简介
步进电机是一种通过接收脉冲信号来控制转动角度的电机。通过发送一系列脉冲,可以精确地控制步进电机的旋转位置和速度。
中断是一种硬件机制,当发生特定事件时,可以暂停当前正在执行的程序,并执行一个称为中断处理程序的预先定义的代码块。中断处理程序完成后,程序将继续从中断发生时的位置继续执行。
步进电机中断程序是一种使用中断来控制步进电机旋转的程序。当步进电机驱动器接收到脉冲信号时,会产生一个中断。中断处理程序将读取脉冲信号,并根据脉冲信号更新步进电机的旋转位置。
步进电机中断程序设计
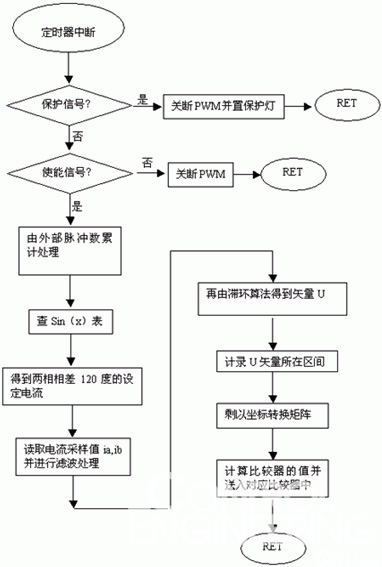
步进电机中断程序的设计需要考虑以下几个方面:
- 中断源:中断源是触发中断的事件。对于步进电机而言,中断源是步进电机驱动器接收到的脉冲信号。
- 中断处理程序:中断处理程序是响应中断事件执行的代码块。中断处理程序负责读取脉冲信号,并更新步进电机的旋转位置。
- 中断优先级:中断优先级决定了当多个中断同时发生时,哪个中断将首先处理。步进电机中断通常具有较高的优先级,以确保步进电机能够及时响应脉冲信号。
- 中断使能和禁止:中断使能和禁止控制中断是否允许发生。在不需要步进电机中断时,可以禁止中断,以节省系统资源。
步进电机中断程序示例
以下是一个使用中断来控制步进电机的示例程序:
c include结论
步进电机中断程序是控制步进电机旋转的有效方法。通过使用中断,可以确保步进电机能够及时响应脉冲信号,从而实现精确的控制。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论