步进电机控制方法
步进电机是一种将电脉冲信号转换为机械运动的电机。步进电机的特点是准确的定位能力和较低的运行速度。步进电机有各种类型的控制方法,包括:
- 全步驱动:这种方法使用两相或四相电机,并以全步的方式驱动电机。这种方法简单易于实现,但效率较低,而且运动可能不平稳。
- 半步驱动:这种方法使用两相或四相电机,但在全步驱动基础上增加了半步驱动。这种方法提高了精度和效率,但控制更加复杂。
- 微步驱动:这种方法使用两相或四相电机,并以较小的步长驱动电机。这种方法提供了最高的精度和效率,但控制最复杂。
步进电机控制程序
步进电机控制程序是一个将电脉冲信号发送到步进电机驱动器的程序。该程序负责控制电机的速度、方向和位置。步进电机控制程序通常使用微控制器或专用集成电路 (IC) 来实现。
步进电机控制程序的设计涉及以下几个主要步骤:
- 确定要使用的步进电机控制方法。
- 选择合适的微控制器或 IC。
- 编写步进电机控制程序。
- 调试和测试程序。
实践示例
以下是一个使用 Arduino Uno 微控制器控制双相步进电机的简单示例程序:
```C++include结论
步进电机控制程序是控制步进电机的基本组件。通过遵循本文中概述的步骤,您可以为您的项目设计和实现有效的步进电机控制程序。
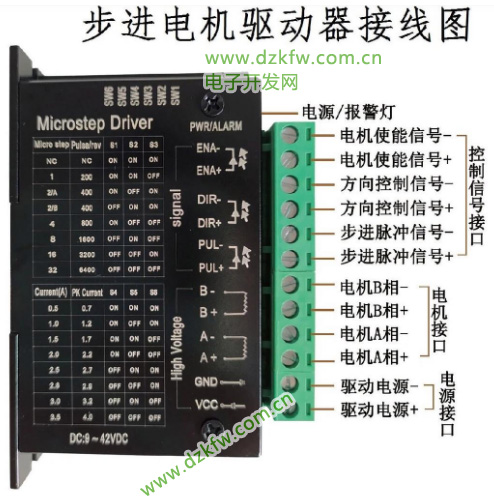
步进电机的控制方法及需要哪些重要的控制信号
步进电机的控制信号无非就是PUL脉冲信号和DIR方向信号再加上一个+5V的公共端
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!