
目录
- 案例1:基本输入/输出控制
- 案例2:定时器和计数器控制
- 案例3:PID 控制
- 案例4:运动控制
- 案例5:通信
案例1:基本输入/输出控制
简介
本案例展示了如何使用三菱 QD70 PLC 控制基本输入和输出设备,例如开关和指示灯。
程序
LD X0 ; 检查输入点 X0 是否为 ONOUT Y0 ; 如果 X0 为 ON,则打开输出点 Y0
案例2:定时器和计数器控制
简介
本案例展示了如何使用三菱 QD70 PLC 的定时器和计数器来控制不同功能。例如,可以将定时器用于延迟操作,而计数器用于计算脉冲。
程序
TMR T0, K1000 ; 设置定时器 T0,延迟 1 秒T0ON ; 启动定时器 T0LD T0C ; 检查定时器 T0 是否已完成OUT Y1 ; 如果定时器 T0 已完成,则打开输出点 Y1CNTR C0, K100 ; 设置计数器 C0,计数到 100CNT0 ; 启动计数器 C0LD C0GT100 ; 检查计数器 C0 是否大于 100OUT Y2 ; 如果计数器 C0 大于 100,则打开输出点 Y2
案例3:PID 控制
简介
本案例展示了如何使用三菱 QD70 PLC 实现 PID 控制,这是一种广泛用于工业自动化中调节过程变量的控制方法。
程序
PID 控制程序通常包括以下步骤:
- 读取过程变量(PV)并将其与设定值(SV)进行比较。
- 计算偏差(e)并将其传递给 PID 算法。
- PID 算法根据偏差计算控制输出(u)。
- 将控制输出发送到执行器。
以下是一个示例程序:
LD PV ; 读取过程变量SUB SV ; 计算偏差 eMUL Kp, e ; 计算比例项INT ; 积分MUL Ki, e ; 计算积分项DIFF ; 微分MUL Kd, dE ; 计算微分项ADD ; 计算控制输出 uOUT AO ; 发送控制输出
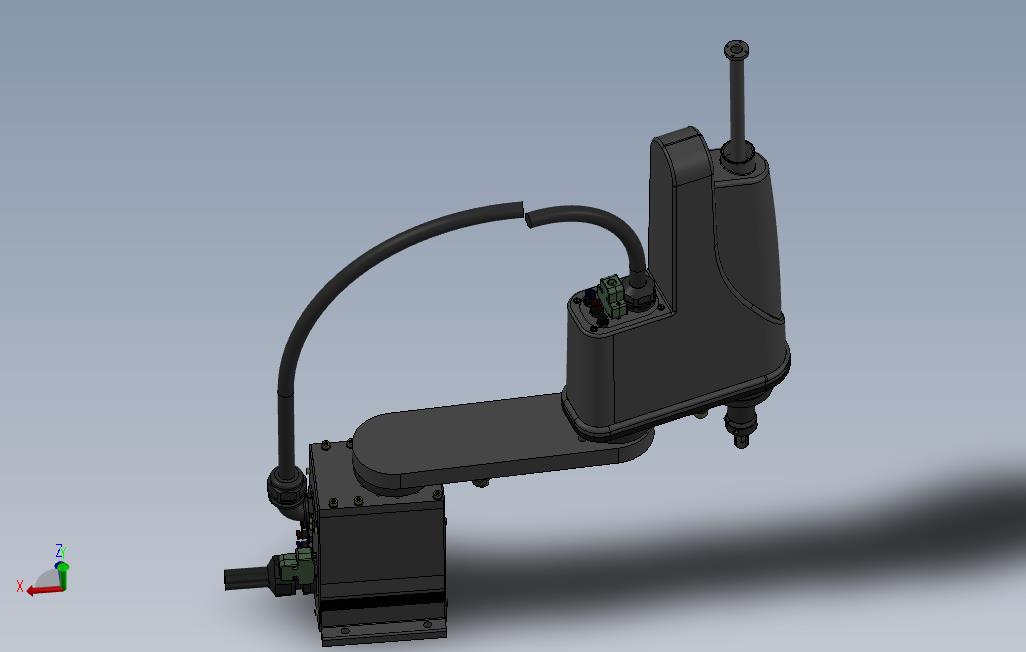
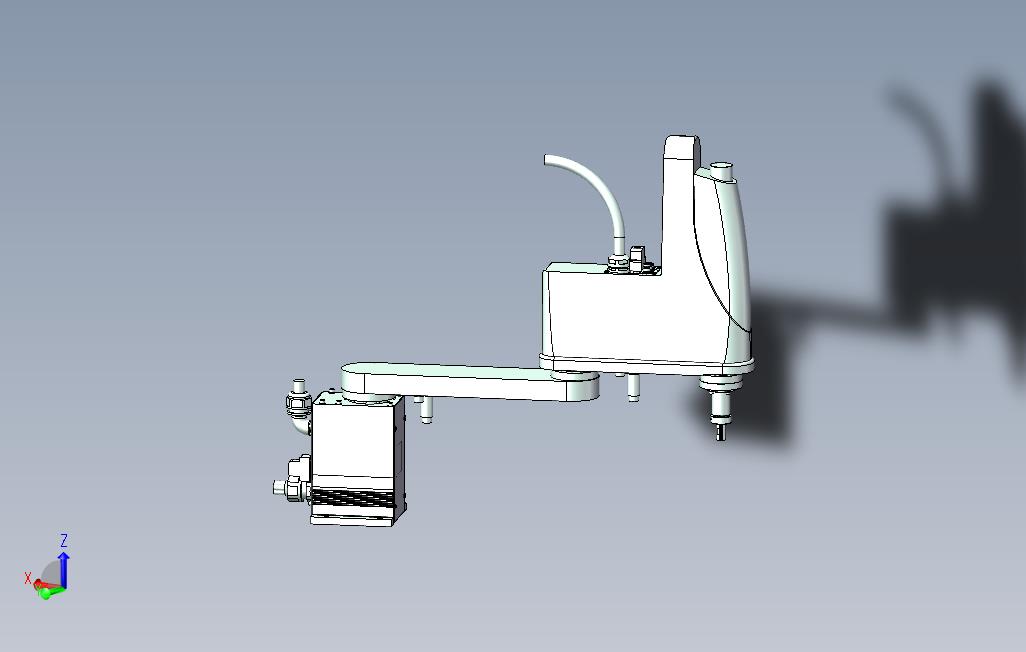
案例4:运动控制
简介
本案例展示了如何使用三菱 QD70 PLC 控制步进电机或伺服电机等运动设备。
程序
运动控制程序通常包括以下步骤:
- 设置目标位置。
- 计算与目标位置的偏差。
- 根据偏差计算控制输出。
- 将控制输出发送到运动设备。
以下是一个示例程序:
LD目标位置 ; 设置目标位置SUB当前位置 ; 计算偏差MUL Kp, e ; 计算比例项INT ;
各位朋友,三菱Q01+QD70P8怎么回原点啊,如附件中程序。 按照QD70P8里那段程序写,回原点没反应。 接线肯定没问题的,因为手动都动起来了。 OPR参数先前也设
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!



添加新评论