
简介
步进电机是一种将电脉冲转换为机械运动的电机。闭环步进电机使用反馈传感器来监测电机的实际位置,从而实现更精确的控制。
本文将介绍使用 C 语言对闭环步进电机进行控制的步骤,并讨论闭环步进电机与伺服电机的区别。
硬件连接
闭环步进电机控制系统需要以下硬件组件:
- 闭环步进电机
- 步进电机驱动器
- 反馈传感器(例如编码器)
- 微控制器
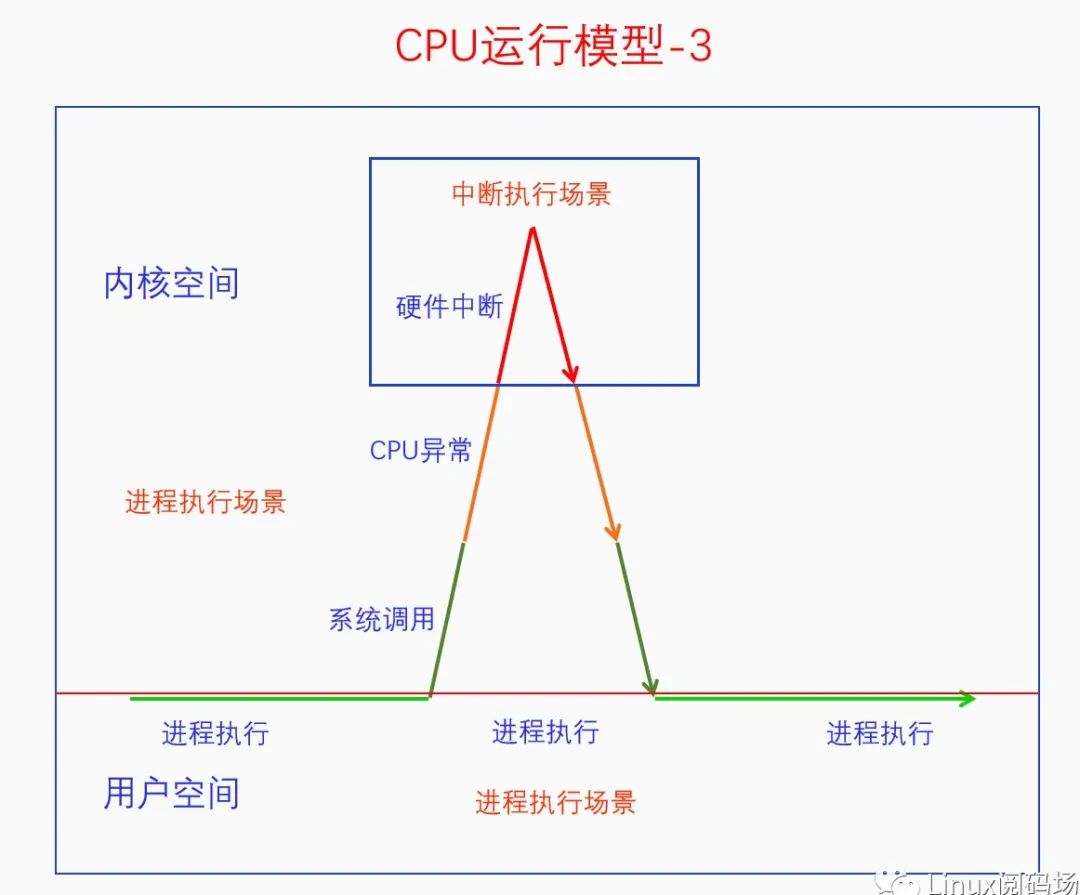
微控制器通过脉冲宽度调制 (PWM) 信号控制电机驱动器。反馈传感器提供有关电机位置的信息,然后使用 PID 控制器进行处理以确定所需的校正量。
软件实现
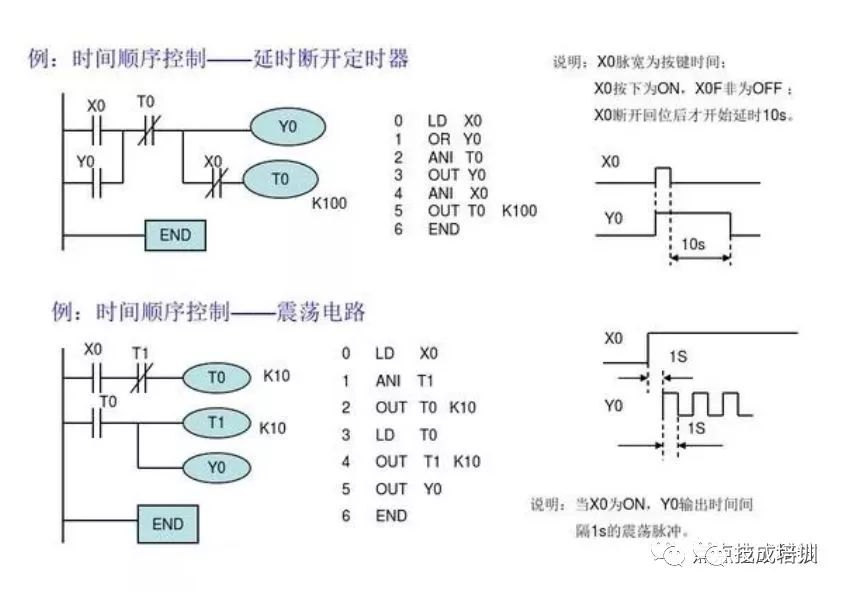
以下是用 C 语言编写的闭环步进电机控制软件示例:
```cinclude闭环步进电机和伺服电机区别
闭环步进电机和伺服电机都是用于精确控制运动
两者相同之处在于都可以进行定位控制,都可以接收脉冲来实现定位。 步进电机一般做不大,1KW以下,速度低,一般在500转/分钟以下,步进基本上是开环的,虽然有细分功能,精度高和大扭矩的场合就不合用,步进价格便宜;伺服可以做得比较大,带编码器可以做闭环控制,精度高,力矩大,价格贵,高档东西。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!




添加新评论