简介
步进电机是一种将电脉冲信号转换成机械转动的电动机。它们在各种应用中得到广泛使用,包括:数控机床机器人3D 打印机相机镜头医疗器械型号
有各种类型的步进电机,每种类型都有其独特的特性。最常见的类型包括:永磁步进电机:使用永久磁铁产生的磁场来驱动转子。它们具有较低的转矩,但精度较高。变阻步进电机:使用电磁线圈产生的磁场来驱动转子。它们具有较高的转矩,但精度较低。混合式步进电机:结合了永磁电机和变阻电机的特性,提供了中等范围的转矩和精度。参数
定义步进电机性能的关键参数包括:步角:电机在收到一个脉冲信号时旋转的最小角度增量。保持转矩:当电机未通电时,它能够保持在静止位置的转矩。额定转速:电机在最大转矩下可以达到的最高转速。微步驱动:将每个脉冲信号细分成更小的增量的技术,从而提高电机的精度。应用
步进电机在各种应用中得到广泛使用,包括:位置控制:用于控制机器或机械臂的精确位置。速度控制:用于控制机器或设备的速度。开/关控制:用于打开或关闭阀门或开关。医疗器
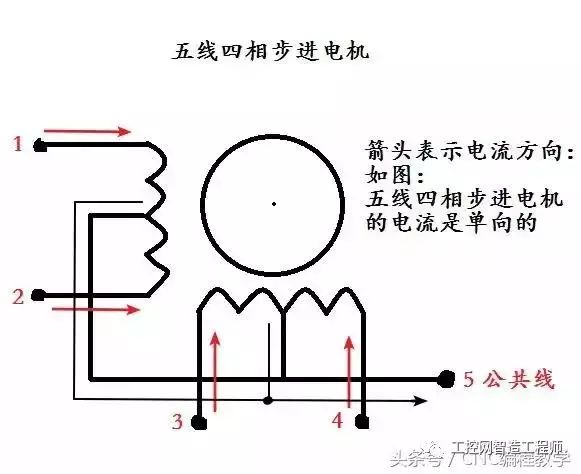
步进电机的一些基本参数:电机固有步距角:它表示控制系统每发一个步进脉冲信号,电机所转动的角度。 电机出厂时给出了一个步距角的值,如86BYG250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为‘电机固有步距角’,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。 步进电机的相数:是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。 电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72° 。 在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足自己步距角的要求。 如果使用细分驱动器,则‘相数’将变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。 保持转矩(HOLDING TORQUE):是指步进电机通电但没有转动时,定子锁住转子的力矩。 它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。 由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。 比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电机。 DETENT TORQUE:是指步进电机没有通电的情况下,定子锁住转子的力矩。 DETENT TORQUE 在国内没有统一的翻译方式,容易使大家产生误解;由于反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE。 步进电机的一些特点:1.一般步进电机的精度为步进角的3-5%,且不累积。 2.步进电机外表允许的最高温度。 步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。 3.步进电机的力矩会随转速的升高而下降。 当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。 在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。 4.步进电机低速时可以正常运转,但若高于一定速度就无法启动,并伴有啸叫声。 步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。 在有负载的情况下,启动频率应更低。 如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。 步进电动机以其显著的特点,在数字化制造时代发挥着重大的用途。 伴随着不同的数字化技术的发展以及步进电机本身技术的提高,步进电机将会在更多的领域得到应用。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论