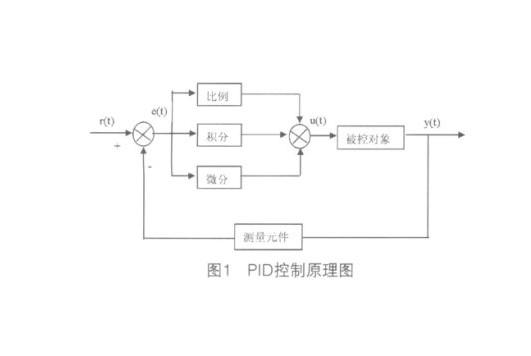
PID 控制是一种反馈控制系统,它利用误差信号的三项:比例 (P)、积分 (I) 和微分 (D) 来计算控制输出信号。
PID 控制器参数
PID 控制器有三个可调参数:
- 比例增益 (Kp):调整控制输出与误差信号之间的比例关系。
- 积分时间 (Ti):调整控制器对误差信号积分的响应时间。
- 微分时间 (Td):调整控制器对误差信号变化率的响应时间。
如何调整 PID 参数
调整 PID 参数是一个反复试验的过程。以下是调整指南:
1. 从默认值开始
对于大多数应用,以下默认值通常是一个良好的起点:
- Kp = 1
- Ti = 1
- Td = 0
2. 调整比例增益 (Kp)
从一个小的 Kp 值开始,然后逐渐增加它,直到系统响应达到所需程度。如果 Kp 太大,系统将变得不稳定。如果 Kp 太小,系统将响应缓慢。
3. 调整积分时间 (Ti)
Ti 确定控制器对误差信号积分的响应时间。增加 Ti 将减少系统中的稳态误差,但也会导致响应速度变慢。减小 Ti 将增加响应速度,但可能会导致稳态误差增加。
4. 调整微分时间 (Td)
Td 确定控制器对误差信号变化率的响应时间。增加 Td 将提高系统稳定性,但也会导致响应速度变慢。减小 Td 将增加响应速度,但可能会导致稳定性降低。
5. 反复试验
调整 PID 参数需要反复试验。耐心调整参数,直到达到所需的系统响应为止。
PID 控制器调优技巧
以下是一些调优 PID 控制器的技巧:
- 从一个极端开始。例如,可以从一个非常高的 Kp 值开始,然后逐渐减少它,直到达到稳定的响应。
- 逐个调整参数。一次只调整一个参数,然后观察系统的响应。
- 使用测试信号。可以施加一个阶跃或正弦波信号到系统,然后观察控制器的响应。
- 使用仿真工具。有许多仿真工具可以帮助您调整 PID 参数。
结论
PID 控制是一个强大的工具,可用于控制各种系统。通过仔细调整 PID 参数,您可以优化系统性能并获得所需的响应。
一、关于PID调节:1、比例调节(P):是一种简单控制方式,,其输入与输出偏差信号的积分成比例关系。 系统一旦出现了偏差,比例环节就立即进行反应来减少偏差。 比例调节的作用设置的越大,调节的速度就越快;但比例作用过大时,会使系统的稳定性下降。 另外,只采用比例调节的系统输出将存在稳态误差。 2、积分调节(I):用于消除系统中的稳态误差,他的输入与输出偏差信号的积分成正比关系。 如果系统进入稳态后存在稳态误差,则称为有差系统,为了消除稳态误差,就需要引入“积分”调节。 积分作用的强弱取决于积分时间常数的选取,随着积分时间常数的增大,积分作用会增强。 使用积分调节时即便的偏差很小,积分项也会随着时间的增加而积累加大,它推动控制器的输出增大,使稳态误差进一步减少,直到等于零。 因此,加入积分调节能保证系统静态精度。 但积分作用会使系统的动态响应变慢,若参数选择的不当会影响系统稳定性。 积分调节经常与其它两种调节作用配合,组成比例积分(PI)调节器 或PID调节器。 3、微分调节(D):主要反映系统偏差信号的变化率,控制器的输出与输入偏差信号的微分(偏差的变化率)成正比关系。 自动控制系统在克服偏差的调节过程中可能会出现振荡甚至失稳,主要原因是由于系统中存在有较大惯性环节或滞后环节,这类环节具有抑制偏差的作用,但其变化总是落后于偏差变化。 解决的办法是增加微分的调节,使其抑制偏差作用的变化“超前”产生,即调节器在克服偏差的调节过程中使偏差接近零时,抑制偏差的作用就提前为零,微分调节能预测偏差变化的趋势,能产生超前的控制作用。 具有微分环节的调节器,能够提前使抑制偏差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。 但是,微分环节对干扰也有一定的放大作用,过强的微分控制对系统抗干扰不利。 微分环节不能单独使用需要与另两类调节结合来完成系统控制要求。 二、控制系统PID参数调试方法:控制系统的PID参数整定方法有:经验法、衰减曲线法、临界比例法、反应曲线法。 1、经验法又叫现场凑试法,即先确定一个调节器的参数值PB和Ti,通过改变给定值对系统加一个扰动,观察曲线形状。 通过改变PB或Ti,反复凑试直到控制系统符合动态过程品质要求为止,这时的PB和Ti就是最佳值。 如果调节器是PID三作用式,那么要在整定好的PB和Ti的基础上加进微分作用,直到PB、Ti和Td取得最佳值为止。 2、衰减曲线法是以4:1衰减作为整定要求的,先切除的积分和微分作用,用凑试法整定纯比例控制作用的比例带PB,使之符合4:1衰减比例的要求,记下此时的比例带PBs和振荡周期e4b893e5b19e266Ts。 如果加进积分和微分作用,可按公式进行计算。 3、临界比例带法,先要切除积分和微分作用,让系统在纯比例控制作用下运行,然后逐渐减小PB,直到达到等幅振荡时,记下此时的比例带PBk(称为临界比例带)和波动周期Tk,然后经验公式求出TI、TD参数值。 4、反应曲线法,是知道控制对象的特性参数,即时间常数T、时间迟延ξ和放大系数K,则可按经验公式计算出调节器的参数。 利用这种方法整定的结果可达到衰减率达到0.75的要求。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论