
概述
西门子程序通道控制 (PCC) 是制造业中用于控制复杂机械系统的高级功能。它允许一个应用程序通过称为“通道”的抽象接口与机器上的运动控制组件进行通信。原理
PCC 是一种现场总线协议,在中央处理器 (CPU) 与分布式输入/输出 (I/O) 设备之间建立通信。它使用一个称为“PC-PG”的专有通信协议,该协议通过以太网或 PROFIBUS 网络运行。PCC 通道的结构
PCC 通道分为两层:逻辑通道:这是一条虚拟数据通道,用于在 CPU 和运动控制器 (MC) 之间交换命令和数据。物理通道:这是一条实际的通信路径,用于在逻辑通道上传输数据。物理通道可以是基于以太网或 PROFIBUS 的。优势
使用 PCC 具有以下优势:通用接口:PCC 提供了一个与运动控制组件独立的接口。实时能力:PCC 允许实时控制,确保机械系统的快速、准确响应。高性能:PCC 协议经过优化,可提供高数据传输速率和低延迟。可扩展性:PCC 支持通过添加额外的 MC 来扩展系统。易于集成:PCC 可以轻松集成到现有的自动化系统中。应用
PCC 用于各种制造业应用,包括:机器人控制机床控制包装机械控制材料处理系统控制质量控制和测试系统控制配置和编程
PCC 系统的配置和编程通过西门子 STEP 7 编程环境进行。它提供了一个图形界面,用于创建和管理 PCC 通道、定义数据交换、配置运动控制器并编写应用程序逻辑。示例
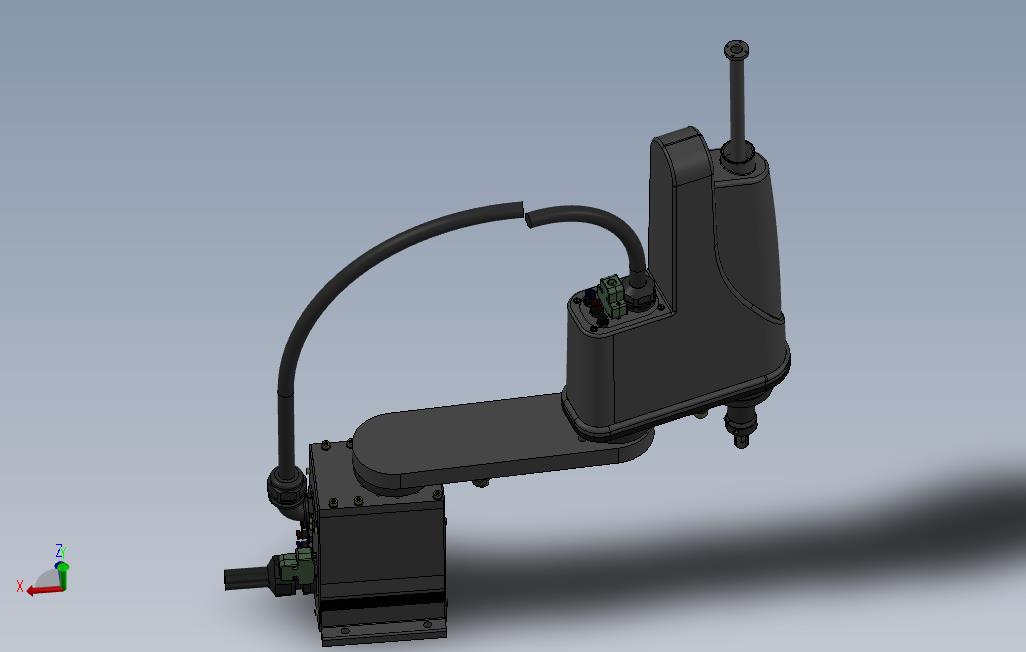
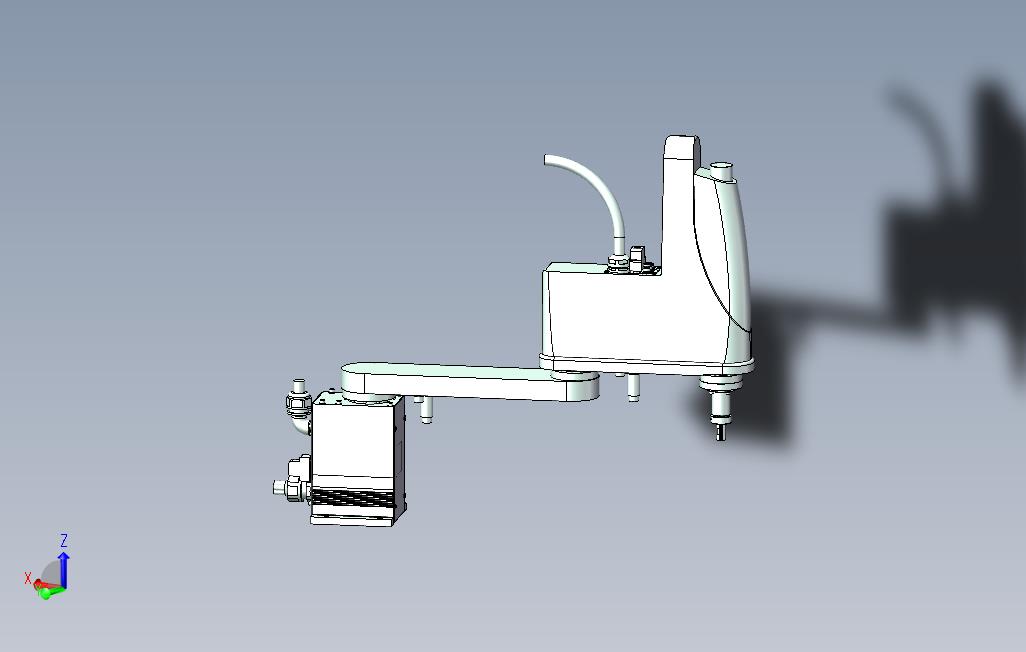
以下是一个示例,展示了如何使用 PCC 控制一个简单的机器人手臂:1. 在 STEP 7 中创建一个新的项目。 2. 添加一个 CPU 和一个运动控制器 (MC) 到硬件配置中。 3. 为机器人手臂创建两个逻辑通道:一个用于运动控制,另一个用于输入/输出数据。 4. 配置物理通道,将逻辑通道与 CPU 和 MC 连接起来。 5. 编写一个应用程序逻辑,用于控制机器人手臂的运动和输入/输出数据。 6. 下载程序到 CPU 和 MC。 7. 启动应用程序并观察机器人手臂响应运动控制命令和输入/输出数据。结论
西门子程序通道控制是一种强大的工具,用于在复杂的机械系统中实现精密运动控制。它提供了一个通用接口、实时能力、高性能和可扩展性,使其成为各种制造业应用的理想选择。通过使用 PCC,工程师可以提高机器的效率和精度,从而提高生产力和产品质量。想在西门子数控系统中快速调用子程序吗?只需直接输入子程序名称即可!以Siemens 802D为例,让我们一起了解如何操作。 🔠子程序命名技巧西门子数控系统的子程序命名有两种方式。 可以选择以连续两个字母开头,后续字符可以是字母、数字或下划线(记得避开分隔符),长度控制在16个字符内。 或者,以地址符L开头,后接数字组成。 👀调用示例在主程序中,只需输入子程序名称即可轻松调用。 例如,L8(或者SS08_12)即可调用子程序L8。 子程序中,只需输入RET即可返回主程序。 🔢多次调用不费力如果你需要多次调用同一个子程序,只需在程序语句中添加字母P和调用次数。 例如,L8 P5(调用子程序L8五次)。 惊喜的是,子程序最多可被调用9999次!
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!



添加新评论