在机器人、自动化设备和许多其他应用中,伺服机都是至关重要的组件。伺服机是一种电机,它可以根据输入信号精确地定位或旋转。为了控制伺服机,需要编写一个伺服程序。
伺服机的基本原理
伺服机由一个电机、一个位置传感器和一个控制电路组成。控制电路测量传感器的位置信号,并根据输入信号与传感器信号的差异来控制电机。通过这种反馈机制,伺服机可以精确地达到目标位置。
伺服程序的工作原理
伺服程序的工作原理类似于一个闭环控制系统。它包含以下步骤:
- 读取输入信号,它指定了伺服机目标位置或速度。
- 读取位置传感器信号,它表明伺服机的当前位置。
- 计算输入信号和传感器信号之间的误差。
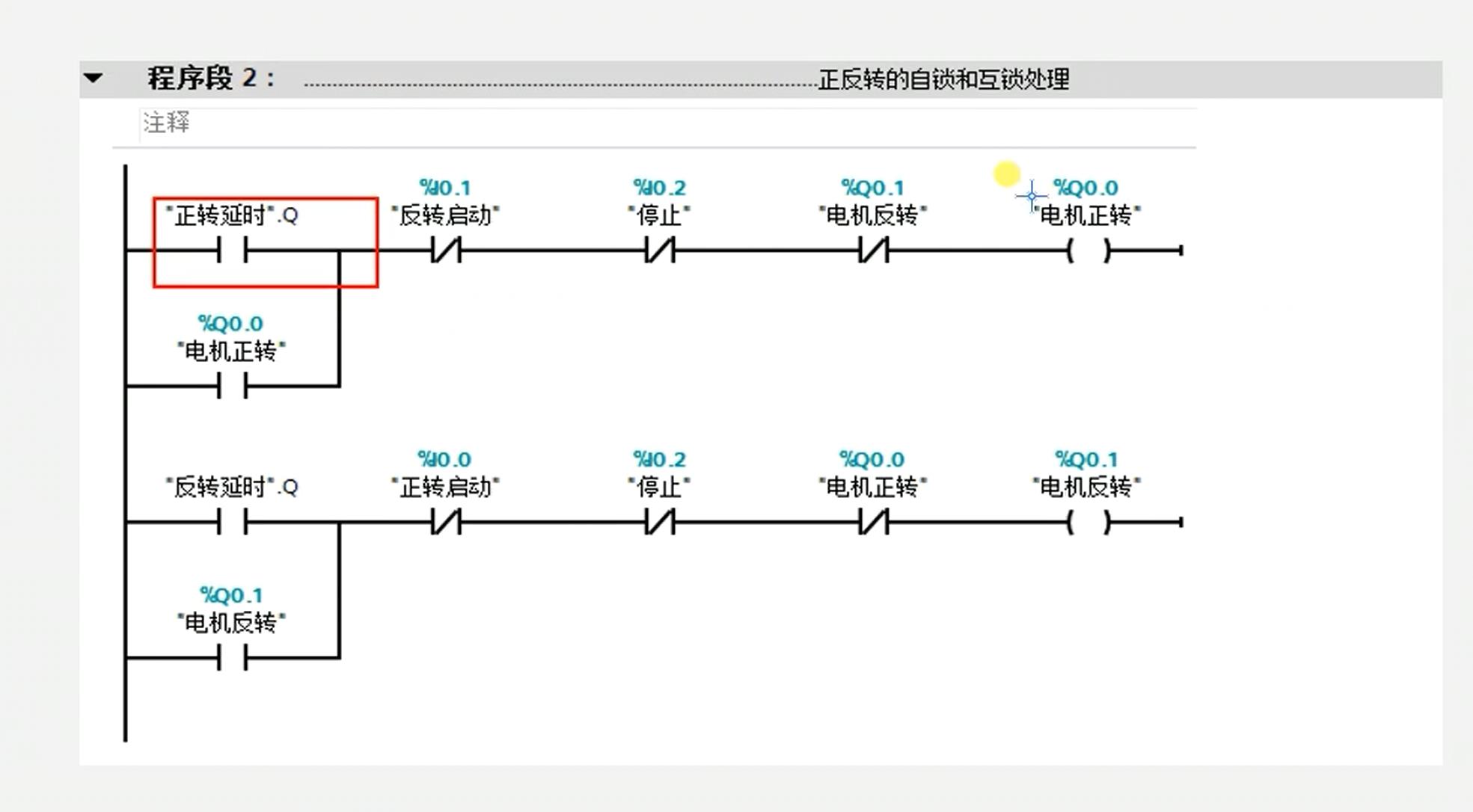
三相异步电动机自锁、互锁、连锁控制的工作原理是什么?
电动机自锁:通过自身结构,保持动作后的状态,并维持不变。 如要电机连续运转,就要在点动按钮两端并联1对接触器动合辅助触点.这种用接触器辅助触点使接触器线圈持续通电流的线路。 电动机互锁:将相互关联的电动机动作相互限制,限制互锁的电动机不能同时动作或者即时同时动作在电动机正反转控制线路中。 为避免2个接触器主触头同时接通,而引起相间电源短路。 要避免2个接触器线圈同时通电.将1个接触器动断辅助触头串接在另1个接触器的线圈电路中。 2个接触器线路都要如此接法,使2个接触器主触头不可能同时接通。 从而避免短路现象。 接触器的2个动断辅助触头称为互锁(联锁)触头。 电动机连锁:通过连锁各类电动机的动作机构,达到预想中的一些列自动反应。 连锁原理接触器KM1和KM2的主触头决不允许同时闭合,否则造成两相电源短路事故。 为了保证一个接触器得电动作时,另一个接触器不能得电动作,以避免电源的相间短路,就在正转控制电路中串接了反转接触器KM2的常闭辅助触头,而在反转控制电路中串接了正转接触器KM1的常闭辅助触头。 当接触器KM1得电动作时,串在反转控制电路中的KM1的常闭触头分断,切断了反转控制电路,保证了KM1主触头闭合时,KM2的主触头不能闭合。 同样,当接触器KM2得电动作时, KM2的常闭触头分断,切断了正转控制电路,可靠地避免了两相电源短路事故的发生。 这种在一个接触器得电动作时,通过其常闭辅助触头使另一个接触器不能得电动作的作用叫联锁。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论