该程序使用 PID 控制算法来控制多台水泵。
原理
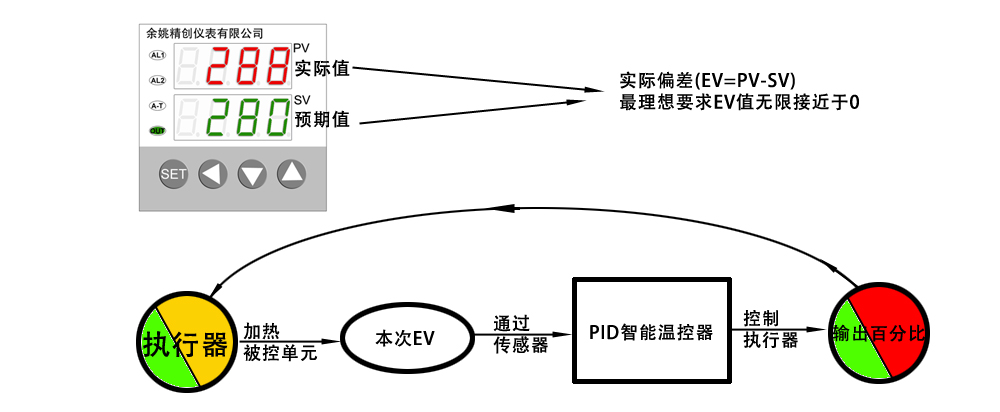
PID 控制算法是一种反馈控制算法,它通过测量与所需值(设定值)之间的误差来计算控制输出。
P (比例) 项与误差成正比,I (积分) 项与误差随时间的积分成正比,D (微分) 项与误差随时间的导数成正比。
通过调整 PID 算法的增益(比例、积分和微分增益)可以优化该算法的性能。
程序
该程序使用模拟量输入来测量水泵的当前流量。
程序根据模拟量输入和设定值之间的误差来计算控制输出。
程序使用脉冲宽度调制 (PWM) 信号来控制水泵的速度。
代码
cpp
include <Arduino.h>// 模拟量输入引脚
const int analogInputPin = A0;// PID 增益
const float Kp = 0.1;
const float Ki = 0.001;
const float Kd = 0.0001;// 设定值
const float setpoint = 1023;// PWM 输出引脚
const int pwmOutputPin = 9;// 误差
float error;// 积分误差
float integralError = 0;// 微分误差
float derivativeError = 0;// 控制输出
float controlOutput;void setup() {// 设置模拟量输入引脚为输入模式pinMode(analogInputPin, INPUT);// 设置 PWM 输出引脚为输出模式pinMode(pwmOutputPin, OUTPUT);
}void loop() {// 读取模拟量输入int analogInputValue = analogRead(analogInputPin);// 计算误差error = setpoint - analogInputValue;// 计算积分误差integralError += error 0.001;// 计算微分误差derivativeError = (error - previousError) / 0.001;// 计算控制输出controlOutput = Kp error + Ki integralError + Kd derivativeError;// 限制控制输出controlOutput = constrain(controlOutput, 0, 255);// 使用 PWM 控制水泵速度analogWrite(pwmOutputPin, controlOutput);// 更新前一个误差previousError = error;
}
结论
该程序可以用于使用 PID 控制和模拟量输入来控制多台水泵。
通过调整 PID 算法的增益,可以优化该算法的性能。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论