PID控制(比例-积分-微分控制)是一种广泛用于工业自动化中的反馈控制技术。它通过调整控制变量(如阀门开度或电机转速)来维持被控变量(如温度、流量或压力)在设定值附近。PID控制在三菱PLC程序中得到广泛应用,本文将介绍其原理、实现方法和典型应用实例。
PID控制原理
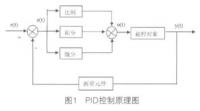
PID控制基于以下公式:
u(t) = Kp e(t) + Ki ∫e(t) dt + Kd de(t)/dt其中:
- u(t) 为控制变量
- e(t) 为设定值与被控变量的误差
- Kp 为比例增益
- Ki 为积分增益
- Kd 为微分增益
Kp、Ki和Kd是需要根据系统响应特性调整的PID参数。Kp对误差的大小进行反应,增加Kp可以提高误差修正速度,但过大会导致系统不稳定。Ki对误差的持续时间进行反应,增加Ki可以消除稳态误差,但过大会导致控制动作过激。Kd对误差变化率进行反应,增加Kd可以改善系统的动态响应,但过大会导致系统振荡。
三菱PLC程序中的PID控制
三菱PLC提供了内置的PID功能块,简化了PID控制算法的实现。该功能块可以使用梯形图或结构化文本语言进行编程。下面是一个使用梯形图实现PID控制的示例程序:
|-----+----+----------+----+-----|| ST | PID | ST | OUT ||----|--------|----|----|| | SET1000 | | -- || | 50 | | -- || | 0.1 | | -- || | 0.001 | | -- || | 0 | |----||---|---|---|---|| | 0 | |----|| | 100 | | -- || | 500 | | -- ||---|---|---|---|| | 1000 | | -- || | 5000 | | -- ||---------------------------|
在这个示例程序中,PID块被配置为以下参数:
- 设定值:100
- 比例增益:50
- 积分增益:0.1
- 微分增益:0.001
- 温度控制:用于控制烤箱、烘干机和反应釜等设备的温度。
- 流量控制:用于控制泵和阀门,以调节流体的流量。
- 压力控制:用于控制压缩机和调节阀,以调节气体或液体的压力。
- 位置控制:用于控制电机和伺服电机,以控制机械臂和机器人等设备的位置。
程序还包含一个模拟量输入(AIN)和模拟量输出(AOUT)模块,用于连接到被控变量和控制变量的传感器和执行器。
典型应用实例
PID控制在工业中有着广泛的应用,以下是几个典型的应用实例:
总结
PID控制是一种强大的反馈控制技术, широко应用于工业自动化。三菱PLC提供了内置的PID功能块,简化了PID算法的实现。通过适当调整PID参数,可以实现精确的控制,消除稳态误差并提高系统的动态响应。本文介绍了PID控制的原理、在三菱PLC程序中的实现方法和典型应用实例,为工程师在工业自动化项目中应用PID控制提供了指导。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论