简介
比例-积分-微分 (PID) 控制器是一种广泛用于工业自动化领域的控制算法。PID 控制器通过调节输入信号来维持输出信号与设定值的误差在最小范围内。PID 控制器具有三个可调参数:比例增益 (Kp)、积分时间 (Ti) 和微分时间 (Td)。这些参数的最佳值取决于被控系统的特性,并且需要根据特定的应用进行调整。自整定程序能够自动调整 PID 参数,从而简化了控制器调谐过程。文章介绍了一种基于 PID 算法的自整定程序,它利用在线数据识别被控系统的特性,并自动调整 PID 参数以获得最佳控制性能。程序原理
该自整定程序基于以下原理:1. 数据采集:程序首先对被控系统的输入和输出信号进行一段时间的采集,以获得系统响应的关键数据。 2. 系统建模:根据采集的数据,程序使用系统辨识算法对被控系统进行建模。所建立的模型用于估计系统的传递函数和时域特性。 3. PID 参数估计:基于识别的系统模型,程序使用优化算法估计 PID 参数,以最小化输出信号与设定值的误差。 4. 参数更新:估计的 PID 参数被实时更新到控制器中,以改善控制性能。算法流程
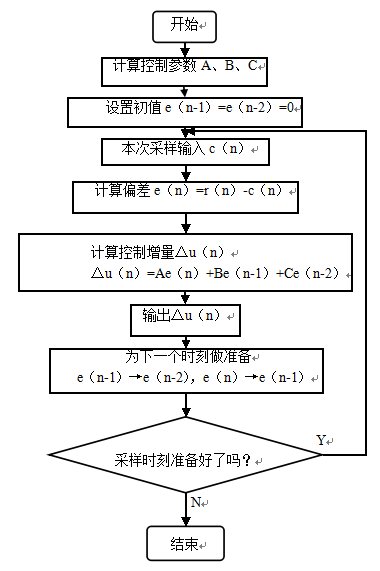
自整定程序的算法流程如下:1. 采集被控系统的输入和输出信号一段时间。 2. 使用系统辨识算法对被控系统进行建模。 3. 使用优化算法估计 PID 参数。 4. 将估计的 PID 参数更新到控制器中。 5. 重复步骤 1-4,直到达到所需的控制性能。优化算法
自整定程序中使用的优化算法可以根据具体的应用进行选择。常用的优化算法包括:本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论