伺服机构是现代工业和自动化领域的基石,在从机器手臂到相机镜头等各种应用中发挥着至关重要的作用。了解伺服机构的运作方式是有效利用它们的关键,本文将深入探讨伺服机构操作的核心,揭开定位系统的神秘面纱。
伺服机构简介
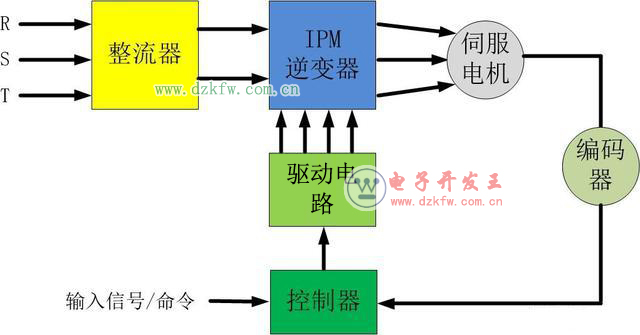
伺服机构是一种定位系统,用于控制对象的运动和位置。它由以下主要部件组成:
- 电机:提供动力,移动物体。
- 编码器:提供位置反馈,测量物体的运动。
- 控制器:比较目标位置和当前位置,并根据误差调整电机的输出。
伺服机构操作原理
伺服机构的运作方式是基于闭环控制系统。通过以下步骤实现精确的定位:
- 目标位置设定:外部信号或控制器内部程序设置目标位置。
- 位置反馈:编码器测量物体的实际位置,并将其反馈给控制器。
- 误差计算:控制器比较目标位置和反馈位置,计算误差。
- 控制输出:控制器根据误差调整电机输出,以减少或消除误差。
- 电机运动:电机响应控制器的输出,移动物体接近目标位置。
PID控制
伺服机构的控制器通常采用PID(比例-积分-微分)控制算法。PID控制包括以下三个主要成分:
- 比例 (P) 成分:与误差成正比。
- 积分 (I) 成分:与误差随时间累积成正比。
- 微分 (D) 成分:与误差导数成正比。
通过调整这些成分,可以优化控制性能,实现快速、准确和稳定的运动。

伺服电机类型
伺服机构可以根据其电机类型进行分类:
- 直流无刷电机:高效、可靠,广泛应用于中小型应用。
- 交流伺服电机:高功率、高扭矩,适用于大负载应用。
- 步进电机:低成本、易于控制,适用于不追求高精度和速度的应用。
伺服机构应用
伺服机构广泛应用于以下领域:
- 机器手臂
- 相机镜头
- 工业机器人
- 医疗设备
- 自动化生产线
选择伺服机构
选择合适的伺服机构至关重要,需要考虑以下因素:
- 负载能力:伺服机构必须能够移动预期的负载。
- 速度和精度:伺服机构必须满足应用所需的运动速度和精度。
- 环境条件:伺服机构必须能够在预期的环境条件下可靠运行。
- 成本:伺服机构的成本必须符合预算。
结论
理解伺服机构操作的核心对于有效利用它们至关重要。闭环控制系统、PID控制算法和多种电机类型为各种应用提供了精确的定位解决方案。通过选择合适的伺服机构并优化其控制参数,可以实现卓越的运动性能,并在现代工业和自动化领域取得成功。
火箭控制系统主要包括导航系统(对导弹武器来说叫制导系统)、姿态控制系统、电源配电系统和测试检查发射控制系统(简称测试发控系统)。 前三者安装在火箭上,通常叫火箭的飞行控制系统。 测试发控系统则安装在地面上。 但它们是一个整体,在对火箭实施控制的过程中,它们的功能虽然各不相同,但却不各行其是。 火箭控制系统是一个非常复杂的综合系统,仪器设备种类繁多,使用的电子元器件数量很大。 测试发控系统是火箭发射前人机对话的主要接口,通过箭地通讯,可掌握箭上设备的工作情况和各种参数,也可将飞行参数向箭上设备装订,最后控制火箭发射。 飞行控制系统的核心是导航系统,它控制火箭的质心按预定的轨迹运动,即控制火箭的飞行精度,保证所运载的航天器准确入轨。 因此,它代表着控制系统的水平。 目前的主要导航方式有位置捷联惯性导航、速率捷联惯性导航和平台计算机惯性导航等。 姿态控制系统控制火箭飞行绕质行绕质心的运动(俯仰、偏航和滚动),保证火箭按规定的姿态飞行。 电源配电系统除完成地面到箭上电源供电的转换外,主要是向各种控制仪器设备提供各自需要的电源,并按飞行程序发出指令,控制火箭工作状态的变化。 飞行控制系统的仪器设备由测量仪表、中间装置、执行机构和电源配电装置等组成。 测量仪表是火箭的眼耳。 导航方式不同,其种类有所不同,但都离不开陀螺和加速度表。 高速旋转的陀螺,能始终保持自身的方向不变,并能觉察到火箭姿态的任何变化。 利用陀螺原理制造的加速度表,则能感受火箭速度的变化。 中间装置主要是电子计算机,它是火箭的大脑,一旦接到测量仪表发来的火箭飞行路线和姿态变化的信号,就立即进行计算,并进行综合处理,将信号放大,传给执行机构,并控制执行机构进行工作。 执行机构是控制系统的手脚。 有电磁阀门及电爆器件、舵机、姿态喷管、摇摆发动机及控制摇摆发动机运动的伺服机构等,它们严格按照中间装置传来的信号命令,使发动机点火、关机,纠正飞行路线和姿态的偏差,使火箭级间分离和有效载荷分离等。 电源配电装置主要包括电池(一次电源)、二次电源、配电器、程序配电器和电缆网等。 长征三号A姿态控制系统采用数字化控制方案,与长征三号相比,有如下的不同点:1)以计算机软件代替模拟量控制的多通道校正网络;2)采用四轴平台,并在系统设计中考虑大姿态角的影响;3)一、二、三级都采用3个速率陀螺方案;4)考虑了双星发射的姿态控制问题。 伺服机构是姿态控制的执行元件。 一、二子级的伺服机构与长征三号的相同。 三子级的伺服机构是新设计的,两套伺服机构控制两台推力室作双向摆动,每套都包括伺服作动器和液压源两部分。 作动器又分A、B两种状态,两者均受液压系统驱动而直接带动推力室。 两种状态的作动器共用一个液压源,由带自封接头的软管联通。 液压源安装在伺服作动器A上,由气动机、液压泵、蓄压器、电磁阀、油箱、过滤器、中频电机及其它附件构成。 气动机是伺服机构的一次能源。 三子级发动机工作时,从推力室头部引出一股氢气,推动气动机的转子旋转,从而带动液压泵工作,而作功后的氢气则通过导管进入液氢箱,对贮箱增压。 液压泵为变量泵。 由于发动机的摆角随火箭受到的干扰量变化,当摆角较小时,液压系统所需的供油量下降,如果泵的供油量不变,将引起系统发热,而变量泵可以根据液压系统的需要供油,从而减少系统的温升。 蓄压器的开闭受电磁阀控制。 临射前用地面氦气对蓄压器充压。 在三子级发动机第一次工作之前,开启蓄压器,伺服机构将提前起控,使推力室摆至控制系统要求的位置。 一旦推力室建压,就立即产生控制力矩。 而在发动机第一次工作结束时,蓄压器已被重新充压,这样在发动机第二次起动前,伺服机构又将提前起控。 气动机与液压泵之间采用超越离合器连接。 三子级发动机工作时,超越离合器处于结合状态,液压泵受气动机驱动。 地面测试时,利用中频电机带动液压泵,这时超越离合器处于脱开状态,气动机转子不受中频电机的影响。 射前可以将具有快卸机构的中频电机取下。 此后如果还需要测试,还可以利用地面氦气源驱动气动机。 伺服机构采用机械反馈,并设有零位液压锁。 机械反馈可以避免因电路故障导致伺服回路开环失控,而液压锁则保证推力室在非工作状态下不发生碰撞。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论