步进电机是一种特殊的电机,它将脉冲输入转换为离散的角位移。这使得它们非常适合需要精确定位的应用,例如 3D 打印机、机器人和 CNC 机床。
使用 PLC(可编程逻辑控制器)对步进电机进行 PWM(脉宽调制)控制是控制电机速度和位置的流行方法。本指南将介绍如何使用 PLC PWM 输出对步进电机进行编程。
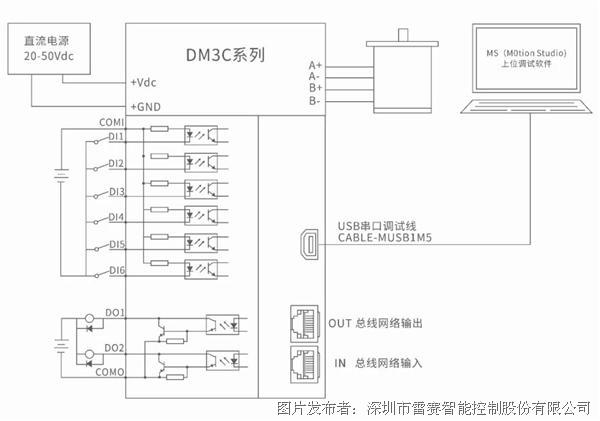
硬件连接
- 将步进电机连接到 PLC 的 PWM 输出端子。
- 将步进电机电源连接到 PLC 的电源端子。
- 将步进电机接地端子连接到 PLC 的接地端子。
软件编程
PLC 程序必须包括以下功能:- 生成 PWM 输出信号,该信号用于控制步进电机的速度和方向。
- 接受来自步进电机的位置反馈信号,用于跟踪步进电机的实际位置。
1. 配置 PWM 输出
在 PLC 程序中,配置 PWM 输出模块。设置 PWM 输出的频率和占空比。频率决定步进电机的速度,占空比决定步进电机的扭矩。2. 生成 PWM 输出信号
使用 PLC 程序生成 PWM 输出信号。输出信号的占空比应根据所需的步进电机速度和扭矩进行调整。3. 接收位置反馈信号
从步进电机接收位置反馈信号。使用 PLC 程序处理反馈信号以跟踪步进电机的实际位置。4. 闭环控制
根据位置反馈信号调整 PWM 输出信号。这形成了一个闭环控制系统,可确保步进电机以所需的速度和位置运行。示例程序
以下是一个示例 PLC 程序,用于 PWM 控制步进电机:```ladder logic// 配置 PWM 输出PWM_OUT(PWM_MODULE, // PWM 模块号PWM_CHANNEL, // PWM 通道号PWM_FREQUENCY, // PWM 频率PWM_DUTY_CYCLE // PWM 占空比);// 生成 PWM 输出信号PWM_START(PWM_MODULE, // PWM 模块号PWM_CHANNEL // PWM 通道号);// 接收位置反馈信号FEEDBACK_IN(FEEDBACK_MODULE, // 位置反馈模块号FEEDBACK_CHANNEL, // 位置反馈通道号FEEDBACK_VALUE // 位置反馈值);// 闭环控制IF (FEEDBACK_VALUE > SETPOINT) THENPWM_DUTY_CYCLE + 1;ELSE IF (FEEDBACK_VALUE < SETPOINT) THENPWM_DUTY_CYCLE - 1;END_IF;```注意事项
在对步进电机进行 PWM 控制时,应注意以下事项:PWM 输出的频率应足够高,以避免步进电机的共振和失步。PWM 输出的占空比应根据步进电机的额定扭矩进行调整。应使用闭环控制系统来确保步进电机以所需的速度和位置运行。结论
基于 PLC PWM 电机控制步进电机是一种控制步进电机速度和位置的有效方法。通过遵循本指南中的步骤,您可以编程 PLC 程序以实现精确定位的精确步进电机控制。本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论