前言
在工业自动化领域,运动控制扮演着至关重要的角色。步进电机和伺服电机是两种广泛应用于运动控制的电机类型,它们各自具有独特的特性和应用场景。本文将深入探讨步进电机和伺服电机的差异,并阐述它们在运动控制中的应用。步进电机
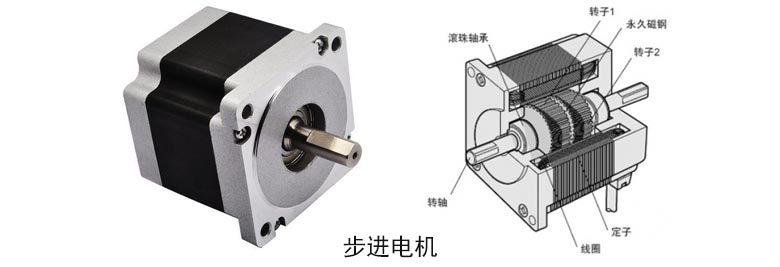
工作原理
步进电机是一种将电脉冲转换成机械转动的电机。它通过励磁定子和永磁转子之间的电磁相互作用实现运动。当定子绕组通电时,产生一个旋转磁场,转子上的永磁会被这个旋转磁场吸引,进而旋转一个步距角。通过控制定子绕组的通电顺序和频率,可以控制转子的旋转方向、速度和位置。特点
- 步进角小:步进电机的基本步距角一般为1.8°或0.9°,精度较高。
- 开环控制:步进电机无需反馈装置,可以通过脉冲控制直接驱动。
- 低速高扭:步进电机在低速时具有较高的转矩,适用于低速重载场合。
- 结构简单,成本较低。
应用
步进电机广泛应用于需要精确定位、低速高扭的场合,例如:- 数控机床
- 打印机
- 机器人
- 半导体设备
伺服电机
工作原理
伺服电机是一种闭环控制的电机。它由电机、编码器、驱动器三个部分组成。电机负责产生转动力矩,编码器负责检测转子的实际位置,驱动器负责比较实际位置和目标位置,并根据偏差调节电机的转速和方向。通过这种闭环控制方式,伺服电机可以实现高精度的定位和速度控制。特点
- 高精度:伺服电机具有较高的定位精度和速度跟踪精度,可满足高精度运动控制需求。
- 高动态响应:伺服电机可以快速响应控制信号的变化,实现快速启停和加减速。
- 闭环控制:伺服电机通过反馈控制实现位置和速度的精确控制。
- 体积小,功率密度高。
应用
伺服电机广泛应用于需要高精度、高动态响应的场合,例如:- 工业机器人
- 数控机床
- 伺服系统
- 医疗设备
步进电机和伺服电机的区别
表1总结了步进电机和伺服电机的主要区别:| 特征 | 步进电机 | 伺服电机 | |---|---|---| | 控制方式 | 开环控制 | 闭环控制 | | 精度 | 较低 | 较高 | | 动态响应 | 较慢 | 较高 | | 成本 | 较低 | 较高 | | 适用场合 | 低速高扭、精度要求较低 | 高精度、高动态响应 |选择步进电机还是伺服电机
选择步进电机还是伺服电机取决于具体应用的需求。如果需要高精度、高动态响应的运动控制,伺服电机是更好的选择。如果需要低速高扭、成本较低的运动控制,步进电机可以满足要求。结论
步进电机和伺服电机都是运动控制中常用的电机类型,它们各自具有独特的特性和应用场景。根据具体应用的需求,选择合适的电机类型至关重要。通过本文的介绍,相信您对步进电机和伺服电机的区别及其应用有了更好的了解。本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论