
定子相数
- 单相
- 两相
- 三相
- 四相
- 五相
工作原理
步进电机的工作原理是当定子绕组的激磁电流切换一次时,转子就会旋转一个固定的角度,称为步距角。步距角一般由切换的相电流产生的旋转力矩得到,因此需要每相极数是偶数。步进电机通常都是两相以上的,但也有一些特殊的只有一条线圈的单相步进电机。
定子
步进电机的定子是由磁芯和绕组组成。磁芯通常采用硅钢片叠压而成,绕组则采用铜线或铝线绕制。
PM型步进电机
PM型步进电机(Permanent Magnet,永久磁铁)的转子是内转子型,外表面分布N、S极。
两相PM型步进电机
两相PM型步进电机有四条相线,相序为A+、A-、B+、B-。当A+、A-两相通电时,转子会朝A相方向旋转一个步距角;当B+、B-两相通电时,转子会朝B相方向旋转一个步距角。
三相PM型步进电机
三相PM型步进电机有六条相线,相序为A+、A-、B+、B-、C+、C-。当A+、B+、C+三相通电时,转子会朝A相方向旋转一个步距角;当B+、C+、A+三相通电时,转子会朝B相方向旋转一个步距角,以此类推。
VR型步进电机
VR型步进电机(可变磁阻反应式步进电机)的转子是由硅钢片或电工纯铁棒等导磁体构成,外表面为多齿结构。当定子线圈通电时,定子磁极磁化,吸引转子齿而产生转矩,使其移动一步。
HB型混合式步进电机
HB型混合式步进电机(Hybrid Brushless Stepping Motor)的转子是PM型永磁步进电机与VR型变磁阻反应式步进电机转子的复合体,因此兼具两种电机的优点。
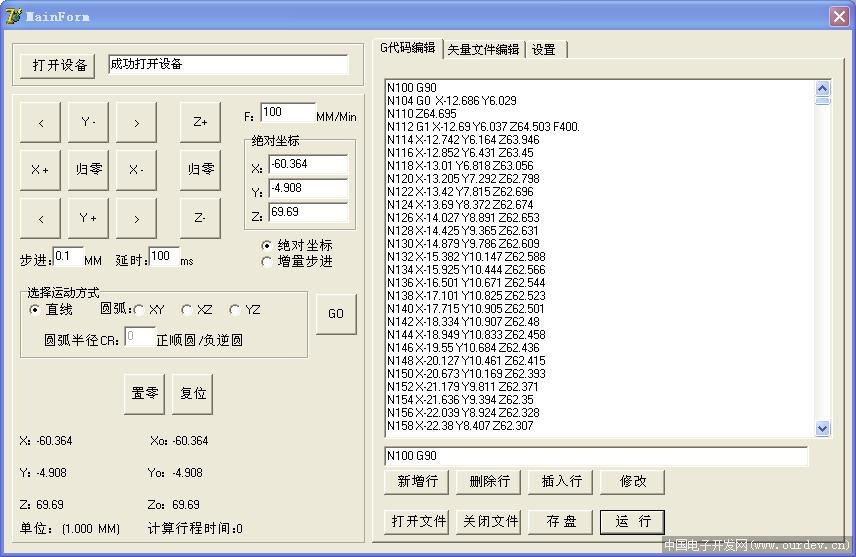
驱动
步进电机的运行需要一个电子装置来驱动,称为步进电机驱动器。驱动器会把控制系统发出的脉冲信号转化为步进电机的角位移。因此步进电机的转速与脉冲信号的频率成正比。
应用
步进电机广泛应用于各种自动化设备中,如数控机床、机器人、打印机等。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!





添加新评论