步进电机是一种将电脉冲转换为角位移或直线位移的电机。它是一种数字电机,其转子每转一个步长角需要一个电脉冲。步进电机的步长角通常为 1.8 度或 0.9 度。
步进电机有两种基本类型:二相步进电机和三相步进电机。二相步进电机有两个绕组,称为 A 相和 B 相。三相步进电机有三个绕组,称为 A 相、B 相和 C 相。
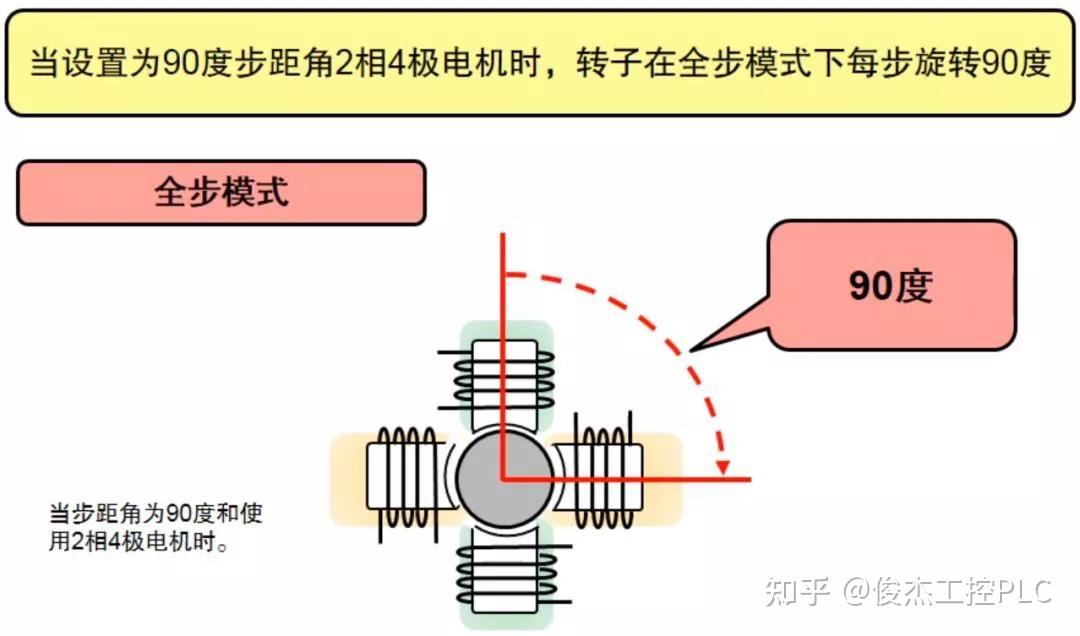
步进电机的运转原理如下:
- 当向 A 相和 B 相施加电流时,电枢会产生磁场。
- 电枢的磁场与定子的磁场相互作用,产生转矩。
- 转矩使电枢旋转一个步长角。
步进电机的正反转模式控制是由控制器的逻辑来实现的。有四种基本正反转模式:
- a+a-b+b- 模式
- a+b-a-b+ 模式
- a+b+a-b- 模式
- a-b-a+b+ 模式
a+a-b+b- 模式是最常用的正反转模式。在这个模式中,A相和B相的电流方向依次为正、正、负、负。这种电流方向的切换会产生一个顺时针的转矩。
步进电机在运行过程中可能会出现抖动和卡顿的问题。抖动通常是由于电机的机械共振引起的。卡顿通常是由于电机的负载过大或转动阻力过大引起的。
以下是一些减少步进电机抖动和卡顿的方法:
- 使用阻尼器来吸收振动。
- 增加电机的惯量。
- 减小电机的负载。
- 优化电机的驱动参数。
通过遵循这些步骤,可以减小步进电机抖动和卡顿的问题,从而提高电机的性能。
结论
步进电机是一种通用且用途广泛的电机类型。通过了解步进电机的运转原理和正反转模式,可以更有效地控制和使用步进电机。
该步进电机为一四相步进电机,采用单极性直流电源供电。 只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。 图1是该四相反应式步进电机工作原理示意图。 向左转|向右转 开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。 当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。 而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。 依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。 四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。 单四拍与双四拍的步距角相等,但单四拍的转动力矩小。 八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论