一、引言
随着工业自动化水平的不断提高,伺服系统在许多领域得到了广泛应用。
伺服模组平移机构作为现代工业自动化的重要组成部分,其性能直接影响到生产效率和产品质量。
本文将重点介绍如何通过调整伺服模组平移机构,实现随线抓取技术,以提高生产线的智能化水平和效率。
二、伺服模组平移机构概述
伺服模组平移机构是一种通过伺服电机驱动,实现精准位移的机构。
其主要由伺服电机、丝杠、导轨、滑块等组成。
通过控制伺服电机的转速和转向,可以实现模组的高精度平移运动。
三、随线抓取技术原理
随线抓取技术是指伺服模组平移机构在移动过程中,能够准确跟踪目标物体的运动轨迹,并实现精准抓取。
该技术主要依赖于伺服系统的位置控制精度和速度控制精度,以及视觉识别系统的辅助。
四、伺服模组平移调整方法
1. 初始位置调整:在安装伺服模组平移机构时,首先要对其初始位置进行调整。确保模组在工作过程中,能够准确回到设定的初始位置,为后续的运动控制打下基础。
2. 位置精度调整:通过调整丝杠的预紧力、导轨的平行度和垂直度等,提高模组的位置精度。这有助于保证抓取过程的准确性。
3. 速度控制调整:伺服电机的转速和转向控制是实现随线抓取技术的关键。通过调整电机的转速和加速度,使模组能够跟随目标物体的运动速度进行精确调整。
4. 视觉识别系统校准:视觉识别系统在随线抓取过程中起到关键作用。需要对视觉系统进行校准,确保其能够准确识别目标物体的位置和运动轨迹。
5. 软件调试与优化:通过调试和优化控制软件,实现对伺服模组平移机构的精确控制。这包括设定运动轨迹、调整运动参数、优化控制算法等。
五、实现随线抓取技术的步骤
1. 安装并校准视觉识别系统:确保视觉系统能够准确识别目标物体的位置和运动轨迹。
2. 设置伺服模组平移机构的运动轨迹:根据目标物体的运动轨迹,设定模组的运动路径。
3. 调整伺服电机的控制参数:通过调整电机的转速、加速度和减速度等参数,使模组能够跟随目标物体的运动速度进行精确调整。
4. 进行实际测试与优化:在实际工作环境中进行测试,根据测试结果对系统进行调整和优化,确保随线抓取技术的实现。
六、实际应用与优势
伺服模组平移机构实现随线抓取技术广泛应用于物流、电子、汽车等领域。其主要优势如下:
1. 提高生产效率:通过实现随线抓取技术,可以大大提高生产线的自动化程度,减少人工操作,从而提高生产效率。
2. 降低误差率:伺服模组平移机构具有高精度位移控制特性,可以大大降低生产过程中的误差率,提高产品质量。
3. 节省空间:通过优化运动轨迹和控制参数,可以实现模组的紧凑排列,节省生产线空间。
4. 降低成本:随线抓取技术可以减少人工搬运和储存成本,降低企业的运营成本。
七、结论
通过调整伺服模组平移机构,实现随线抓取技术,可以大大提高生产线的自动化程度和效率。
在实际应用中,需要关注初始位置调整、位置精度调整、速度控制调整、视觉识别系统校准以及软件调试与优化等方面。
随着技术的不断发展,伺服模组平移机构将在更多领域得到广泛应用,为工业生产带来更大的便利和效益。
机械手工作原理是什么?怎样控制机械手的运动的?
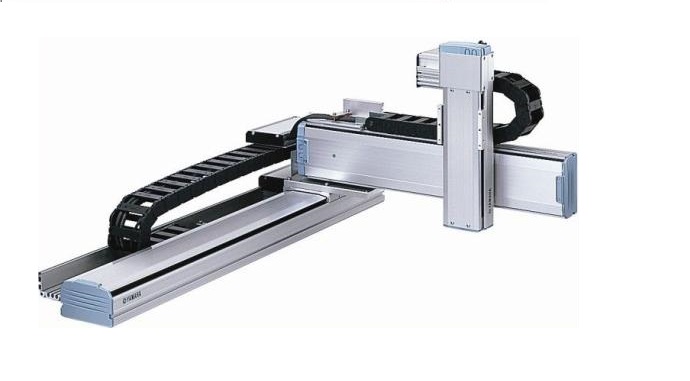
机械手是一种机械手臂,通常是可编程的,与人的手臂有相似的功能;手臂可以是机构的总和,也可以是更复杂的机器人的一部分。 这种机械手的连接通过关节连接,允许旋转运动(例如在关节式机器人中)或平移(线性)位移。 关节式机器人的工作原理其实非常类似于人类手臂的运动特性,人手是通过关节与骨骼以及肌肉的组合运动,才实现了听从大脑指挥并有条件反射等行为;而关节式机器人就是根据人类的这种特性,再通过人类智慧的“结晶”才成功研制的。 线性机械手或者桁架机械手的工作原理机械手工作原理图解:机械手臂是模仿人类手臂动作的机器,它也可以悬挂在桁架上,这种机械手称为桁架机械手。 它由多个梁和机械手总成组成,机械手臂的一端悬挂于横向模组上,另一端则有手腕和手指,手腕可以多自由度旋转,手指可以装夹物体,它们都可以被人类直接或远距离控制。 然而,桁架机械手只是各种不同机械手臂中的一种。 机械手是伺服电机驱动的三轴桁架机械手,简单解释一下三轴的意思,其实可以简单理解为这台机械手是由三个伺服电机组成的。 图中可以明显看到的有两台伺服电机,还有一台伺服电机是控制前后移动的机械手臂部分,在整台机械手的后方,所以图中未能看到。 然后我们来解释一下其余两台伺服电机的作用。 横向臂上面的这台伺服电机是控制横向臂上的纵向和横向机械手臂的整体横向移动,可以在横向臂上任何位置精准定位。 纵向臂上的伺服电机自然是控制纵向臂的上下移动动作,同时也是抓取物料的关键机械手臂和需要做到最精准的伺服电机的组合。 机械手臂可以像镊子一样简单,也可以像假肢一样复杂。 换句话说,如果一个机构能抓住一个物体,抓住一个物体,像手臂一样传递物体,那么它可以被归类为机械手。 最近的进展已经带来了未来医学领域的改进,包括假肢和机械手臂。 当机械工程师建造复杂的机械手臂时,目标是让手臂完成普通人类无法完成的任务。
机智过人3机械手什么原理?
机械手是一种机械手臂,通常是可编程的,与人的手臂有相似的功能;手臂可以是机构的总和,也可以是更复杂的机器人的一部分。 这种机械手的连接通过关节连接,允许旋转运动(例如在关节式机器人中)或平移(线性)位移。 关节式机器人的工作原理其实非常类似于人类手臂的运动特性,人手是通过关节与骨骼以及肌肉的组合运动,才实现了听从大脑指挥并有条件反射等行为;而关节式机器人就是根据人类的这种特性,再通过人类智慧的“结晶”才成功研制的。 线性机械手或者桁架机械手的工作原理机械手工作原理图解:机械手臂是模仿人类手臂动作的机器,它也可以悬挂在桁架上,这种机械手称为桁架机械手。 它由多个梁和机械手总成组成,机械手臂的一端悬挂于横向模组上,另一端则有手腕和手指,手腕可以多自由度旋转,手指可以装夹物体,它们都可以被人类直接或远距离控制。 然而,桁架机械手只是各种不同机械手臂中的一种。 机械手是伺服电机驱动的三轴桁架机械手,简单解释一下三轴的意思,其实可以简单理解为这台机械手是由三个伺服电机组成的。 图中可以明显看到的有两台伺服电机,还有一台伺服电机是控制前后移动的机械手臂部分,在整台机械手的后方,所以图中未能看到。 然后我们来解释一下其余两台伺服电机的作用。 横向臂上面的这台伺服电机是控制横向臂上的纵向和横向机械手臂的整体横向移动,可以在横向臂上任何位置精准定位。 纵向臂上的伺服电机自然是控制纵向臂的上下移动动作,同时也是抓取物料的关键机械手臂和需要做到最精准的伺服电机的组合。 机械手臂可以像镊子一样简单,也可以像假肢一样复杂。 换句话说,如果一个机构能抓住一个物体,抓住一个物体,像手臂一样传递物体,那么它可以被归类为机械手。 最近的进展已经带来了未来医学领域的改进,包括假肢和机械手臂。 当机械工程师建造复杂的机械手臂时,目标是让手臂完成普通人类无法完成的任务。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论