一、引言
在现代机械工程中,伺服系统被广泛应用于各种设备,其中最常见的是用于驱动主轴升降的伺服电机。
伺服电机作为精密控制的核心部件,能够实现高速、高精度、高稳定性的运动控制。
本文将深入探讨伺服电机的概念、工作原理以及其在驱动主轴升降中的应用。
二、伺服电机的概念
伺服电机是一种受控电机,通过接收外部控制信号,按照预设的指令进行精确的运动控制。
伺服电机具有高精度、高响应速度、高稳定性等特点,广泛应用于各种自动化设备中。
伺服系统主要由控制器、伺服电机和传感器三部分组成,其中控制器负责发送控制信号,伺服电机负责执行动作,传感器负责反馈实际位置信息。
三、伺服电机的工作原理
伺服电机的工作原理主要基于电机的电磁学原理。
当外部控制信号作用于伺服电机时,电机内部的电磁场发生变化,产生转矩,从而驱动电机转动。
伺服电机的运动受控制器发出的控制信号影响,这个信号可以是位置、速度或力矩信号。
同时,传感器会实时反馈电机的实际位置信息给控制器,以便控制器调整控制信号,使电机准确达到预设位置。
四、伺服电机驱动主轴升降的应用
在机械设备中,伺服电机常被用于驱动主轴升降。
主轴升降的精度和稳定性对于设备的性能至关重要。
通过伺服电机驱动,可以实现高精度、高稳定性的主轴升降运动。
具体应用过程中,控制器根据外部指令或内部程序发出控制信号,驱动伺服电机转动。
伺服电机通过减速器、丝杠等传动装置将动力传递给主轴,实现主轴的升降运动。
同时,传感器会实时反馈主轴的实际位置信息给控制器,以便控制器调整控制信号,确保主轴准确达到预设位置。
五、伺服电机在主轴升降中的优势
1. 高精度:伺服电机具有极高的定位精度,能够实现微米级甚至纳米级的定位精度,满足高精度加工需求。
2. 高响应速度:伺服电机能够快速响应控制信号,实现快速的主轴升降运动。
3. 高稳定性:通过精确的控制系统,伺服电机能够保持主轴升降的稳定性,提高设备的加工质量。
4. 节能环保:与传统的液压系统相比,伺服电机驱动系统具有更低的能耗和更小的污染。
六、实际应用案例
以数控机床为例,伺服电机在驱动主轴升降中发挥着关键作用。
数控机床的主轴升降需要实现高精度、高稳定性的运动控制。
通过伺服电机驱动,数控机床能够实现高速、高精度的加工,提高生产效率和产品质量。
在印刷机械、纺织机械、包装机械等领域,伺服电机也广泛应用于驱动主轴升降。
七、结论
伺服电机作为现代机械工程中重要的运动控制部件,广泛应用于驱动主轴升降。
通过深入了解伺服电机的概念、工作原理及其在主轴升降中的应用,我们可以更好地理解和应用伺服系统,提高设备的性能和质量。
随着技术的不断发展,伺服电机将在更多领域得到应用,为工业自动化、智能制造等领域的发展提供有力支持。
伺服电机的工作原理是什么?
1、伺服电机不同:低惯量伺服电机做的比较扁长,主轴惯量小,当电机做频率高的反复运动时,惯量小,发热就小。 高惯量的伺服电机比较粗大,力矩大,适合大力矩的但不很快往复运动的场合。
2、适用范围不同:一般来说,小惯量的电机制动性能好,启动,加速停止的反应很快,高速往复性好,适合于一些轻负载,高速定位的场合。 中、大惯量的电机适用大负载、平稳要求比较高的场合。
3、使用条件不同:伺服电机驱动器对伺服电机的响应控制,最佳值为负载惯量与电机转子惯量之比为一,最大不可超过五倍。 通过机械传动装置的设计,可以使负载惯量与电机转子惯量之比接近一或较小。
当负载惯量确实很大,机械设计不可能使负载惯量与电机转子惯量之比小于五倍时,则可使用电机转子惯量较大的电机。 使用大惯量的电机,要达到一定的响应,驱动器的容量应要大一些。
扩展资料:
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。 分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
什么是伺服电机?伺服电机怎么工作的?
伺服电机是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。 伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。 伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。 分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。 伺服电机的工作原理:1、伺服系统(servomechanism)是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。 伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。 直流伺服电机分为有刷和无刷电机。 有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),产生电磁干扰,对环境有要求。 因此它可以用于对成本敏感的普通工业和民用场合。 无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。 控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。 电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。 2、交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。 大惯量,最高转动速度低,且随着功率增大而快速降低。 因而适合做低速平稳运行的应用。 3、伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。 伺服电机的精度决定于编码器的精度(线数)。 交流伺服电机和无刷直流伺服电机在功能上的区别:交流伺服要好一些,因为是正弦波控制,转矩脉动小。 直流伺服是梯形波。 但直流伺服比较简单,便宜。
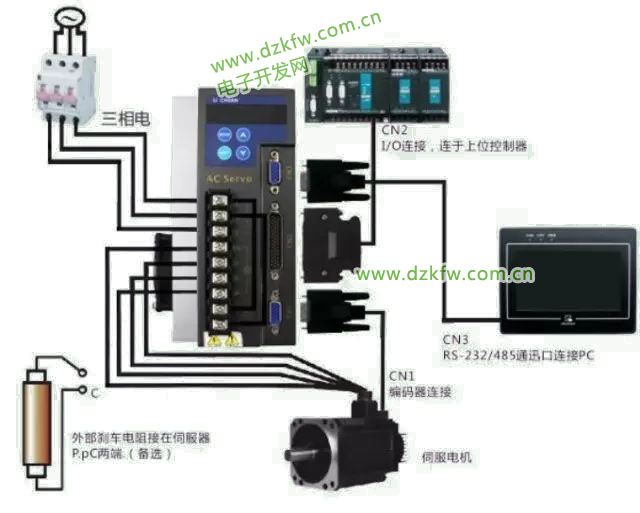
伺服主轴驱动器
伺服驱动器伺服驱动器是用来控制伺服电机的一种控制器,伺服驱动器其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分。 目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,事项数字化、网络化和智能化。 功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。 功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。 经过整流好的三相电或市电,再通过三相正弦PWM电压型逆变器变频来驱动三相永磁式同步交流伺服电机。 功率驱动单元的整个过程可以简单的说就是AC-DC-AC的过程。 整流单元(AC-DC)主要的拓扑电路是三相全桥不控整流电路。 伺服驱动器一般可以采用位置、速度和力矩三种控制方式,主要应用于高精度的定位系统,目前是传动技术的高端。 随着伺服系统的大规模应用,伺服驱动器使用、伺服驱动器调试、伺服驱动器维修都是伺服驱动器在当今比较重要的技术课题,越来越多工控技术服务商对伺服驱动器进行了技术深层次研究。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论