简介
步进电机是一种将电脉冲转换为机械运动的无刷电机。它们广泛用于各种应用中,包括 3D 打印机、机器人和自动化设备。步进电机的驱动方式有很多种,其中最简单的一种是使用 a+a-b+b- 正反转序列。a+a-b+b- 正反转序列
a+a-b+b- 正反转序列是一种由四个步骤组成的驱动序列。每个步骤都会使步进电机向前或向后移动一步。该序列如下:1. a+:向右移动一步 2. a-:向右移动一步 3. b+:向左移动一步 4. b-:向左移动一步要使步进电机反转方向,只需反转序列。例如,要向左移动一步,您可以使用 b-a+b+a- 序列。步进电机驱动芯片
有许多专门用于驱动步进电机的集成电路 (IC)。这些 IC 通常被称为步进电机驱动芯片或步进电机控制器。它们通常采用表面贴装 (SMT) 封装,并具有连接到步进电机线圈和微控制器或其他控制设备的引脚。步进电机驱动芯片通常包含以下特性:内置 PWM 发生器过流保护短路保护热保护微步进功能使用步进电机驱动芯片
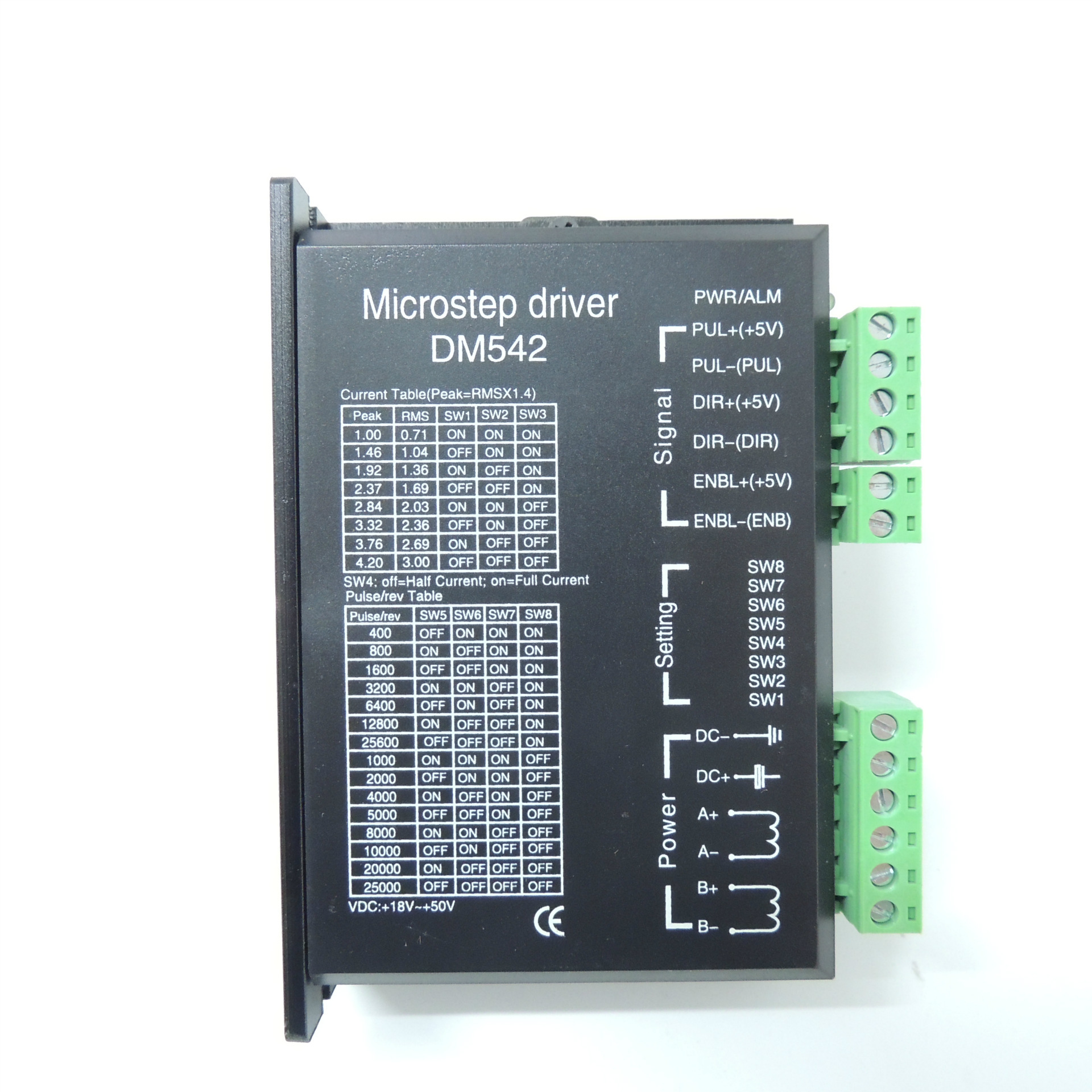
要使用步进电机驱动芯片,您需要将其连接到步进电机和微控制器或其他控制设备。驱动芯片的引脚通常标记为以下内容:VCC:电源引脚GND:接地引脚AIN1、AIN2、BIN1、BIN2:步进电机线圈引脚PUL:脉冲输入引脚DIR:方向输入引脚ENABLE:启用输入引脚 RESET:复位输入引脚具体连接方法因驱动芯片型号而异。请务必参阅数据表以获取详细信息。示例代码
以下是用 Arduino 控制步进电机驱动芯片的示例代码: c++ include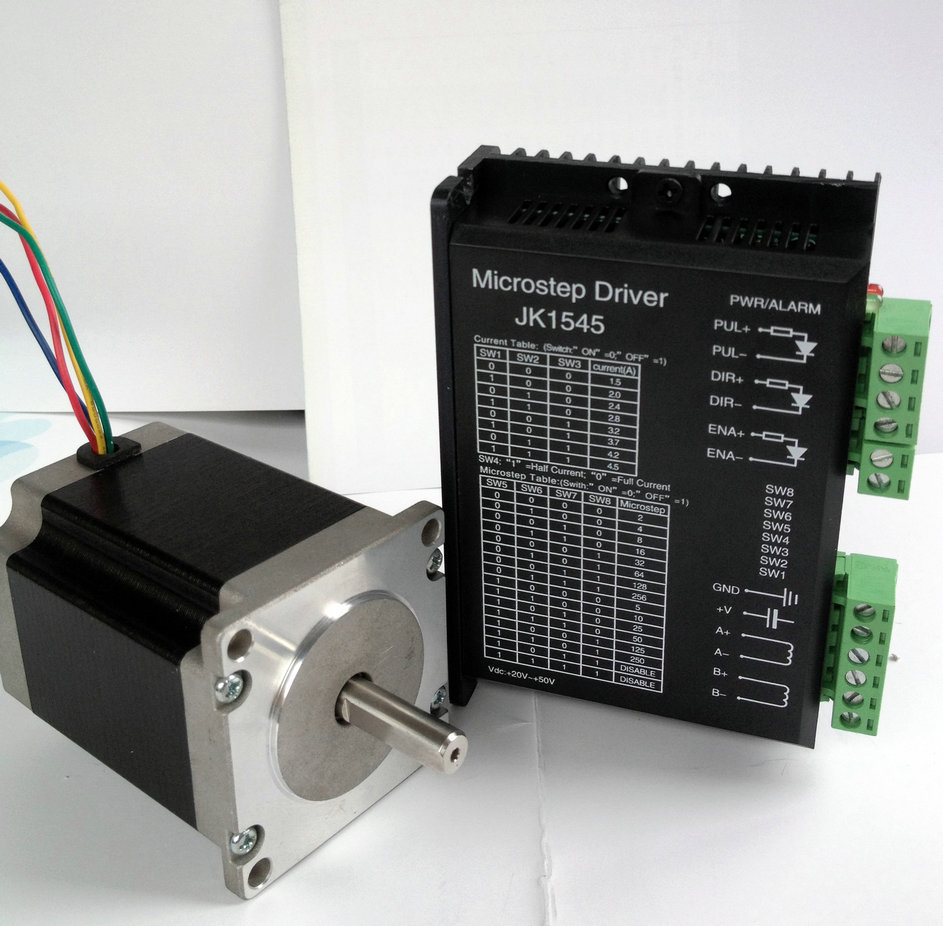
故障排除
如果您在驱动步进电机时遇到问题,以下是一些故障排除技巧:检查步进电机驱动芯片的接线是否正确。确保步进电机驱动芯片已启用。检查步进电机线圈中是否有开路或短路。检查脉冲和方向信号是否正确。尝试降低步进电机的速度。结论
a+a-b+b- 正反转序列是一种驱动步进电机的简单方法。通过使用步进电机驱动芯片,您可以轻松地控制步进电机的方向和速度。如果您按照本指南中的步骤操作,您将能够成功地驱动步进电机并将其用于您的项目中。步进电机上的“A+A-B+B-”就是电机的驱动线,“A+”、“A-”代表一相,“B+”、“B-”代表另一相。 步进电机的定子是几个串联的线圈构成的磁体。 有两个线圈绕组,每个线圈两个头,出线一般是四条线标记为A+,A-,B+,B-。 A相与B相是不通的,用万用表很容易区分出来,至于各相的+-出线实际是不用考虑的,任意一相正负对调电机将反转。 步进驱动器A+A-B+B-控制步进电机运行。 两相四线电机一般采用可逆驱动,所以线圈有正负。 扩展资料:步进电机按照特定的时序激磁,电机就能沿逆时针方向连续旋转。 改变激磁时序,电机将沿顺时针方向连续旋转。 其工作的激磁次序为:正向:A+→A-,B+→B-,A+←A-,B+←B-反向:A+→A-,B+←B-,A+←A-,B+→B-两相步进电机转向变换:只需将电机与驱动器接线的A+和A-(或者B+和B-)对调即可。 如果是第一次接线,一定要确认好电机的相位线,或者按照图纸接线,切记两相步进电机的A+A-和B+B-千万不能接错,如果接错可能造成电机堵转,严重的话电机烧毁。 参考资料:网络百科-步进电机
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论