
在许多控制系统中,PID算法是一种广泛使用的反馈控制算法。许多书中提供的PID算法实现代码都使用浮点型数据,在51单片机上实现这些代码并不容易。
浮点型与定点型
浮点型数据使用指数表示法来表示数字,而定点型数据则使用整数表示法。浮点型数据具有更高的精度,但计算速度也更慢。51单片机只支持定点型运算,因此无法直接使用浮点型数据。PID算法的定点型实现
为了在51单片机上实现PID算法,我们需要将其转换为定点型算法。以下是定点型PID算法的伪代码: error = setpoint - actual; integral = integral + error Kp; derivative = (error - previous_error) Ki; output = Kp error + Ki integral + Kd derivative; previous_error = error; 其中,`error`是目标值和实际值之间的误差,`integral`是误差的积分,`derivative`是误差的导数,`Kp`、`Ki`和`Kd`是PID算法的比例、积分和微分增益,`output`是控制输出。51单片机中的实现
以下是在51单片机中实现PID算法的C语言代码示例: c define Kp 100 define Ki 10 define Kd 1 int error, integral, derivative, previous_error; void pid_control() { error = setpoint - actual; integral += error Kp >> 8; derivative = (error - previous_error) Ki >> 8; output = Kp error + Ki integral + Kd derivative; previous_error = error; } 在51单片机中,除法运算需要使用移位运算代替。将除法运算符`>>`右移8位相当于除以256,这可以使计算保持在定点型范围内。注意事项
在实现PID算法时,需要注意以下几点: 选择合适的增益参数`Kp`、`Ki`和`Kd`非常重要。这些参数会影响系统的响应和稳定性。 确保误差、积分和导数的值不会超过51单片机的定点型范围。如果值溢出,算法将失去准确性。 PID算法只是一个反馈控制算法,其性能取决于传感器的精度、执行器的响应以及系统的其他特性。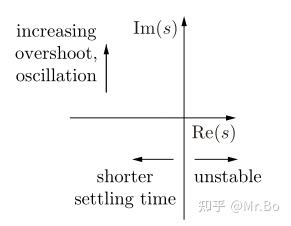
总结
虽然直接调用教材或网上提供的PID代码在51单片机上实现是困难的,但通过将算法转换为定点型并使用适当的移位运算,可以在51单片机中成功实现PID算法。定点型PID算法精度较低,但计算速度更快,适用于对精度要求不高、响应时间要求相对较短的控制系统。本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!





添加新评论