一、引言
DSZR原点回归程序作为一种先进的数据处理和分析工具,广泛应用于各种领域。
本文将通过实际案例分享其具体应用,并重点介绍原点Dog在其中的作用。
通过案例分析,读者将更深入地了解DSZR原点回归程序在实际问题中的解决过程,以及其在实际应用中的优势和挑战。
二、案例背景
某物流公司为了提高运输效率,减少运输成本,决定对其运输路径进行优化。
由于运输过程中存在诸多不确定因素,如路况、天气、车辆状况等,导致实际运输路径往往偏离理想路径。
为了解决这个问题,公司引入了DSZR原点回归程序进行分析和优化。
三、DSZR原点回归程序的应用
1. 数据收集与处理
物流公司收集了大量的运输数据,包括历史运输路径、路况、天气、车辆状态等。
这些数据被整理成标准格式,并输入到DSZR原点回归程序中。
2. 原点Dog的作用
在DSZR原点回归程序中,原点Dog起到了关键的作用。
它能够帮助程序准确识别出数据的原始点,从而为后续的路径优化提供准确的基础。
通过原点Dog的识别,程序能够更准确地分析运输过程中的各种因素,为优化路径提供有力的支持。
3. 路径优化与分析
DSZR原点回归程序根据收集的数据和原点Dog的识别结果,对运输路径进行优化。
程序能够分析出哪些因素导致路径偏离理想状态,并给出优化建议。
例如,程序可能会建议公司在某些路段调整行驶速度,或者在特定天气条件下改变运输路径。
4. 结果评估与反馈
物流公司根据DSZR原点回归程序的优化建议,对运输路径进行调整。
一段时间后,公司再次收集运输数据,并对优化效果进行评估。
通过对比优化前后的数据,公司发现运输效率显著提高,成本得到有效控制。
四、DSZR原点回归程序的优势与挑战
1. 优势
(1)准确性高:DSZR原点回归程序能够准确识别数据的原始点,为路径优化提供准确的基础。
(2)可操作性强:程序能够根据收集的数据和识别结果,给出具体的优化建议。
(3)适用范围广:DSZR原点回归程序可应用于各种领域的路径优化问题,如物流、交通、金融等。
2. 挑战
(1)数据质量:DSZR原点回归程序的效果很大程度上取决于数据的质量。如果数据存在误差或缺失,可能会导致结果不准确。
(2)计算复杂度:对于大规模的数据集,DSZR原点回归程序可能需要较长的计算时间。
(3)实际应用中的不确定性:实际应用中可能存在许多不确定因素,如路况、天气等,这些因素可能导致程序给出的优化建议不能完全符合实际情况。
五、结论
通过实际案例的分享,我们了解了DSZR原点回归程序在物流公司运输路径优化中的应用过程。
原点Dog在其中的作用不可忽视,它帮助程序准确识别数据的原始点,为路径优化提供了有力的支持。
同时,我们也看到了DSZR原点回归程序在实际应用中的优势和挑战。
未来,随着技术的不断发展,我们期待DSZR原点回归程序能够在更多领域得到应用,并解决更多的实际问题。
plc脉冲输出指令有哪些?
三菱FX系列PLC的脉冲输出指令有PLSY脉冲输出,PLSR带加减速的脉冲输出,ZRN圆点回归,DSZR带DOG功能的原点回归,PLSV可变脉冲输出,DRVI相对定位,DRVA绝对定位。 等等西门子S7-200系列PLC的脉冲输出指令只有PLS指令。 等等。 望采纳。 。 。 。 。 。
三菱PLC指令DSZR是如何实现原点搜索呢?是不是碰到极限位置了会自动反回来搜索呢?
三菱PLC的DSZR指令可以用M8342指定Y0端口原点回归方向。
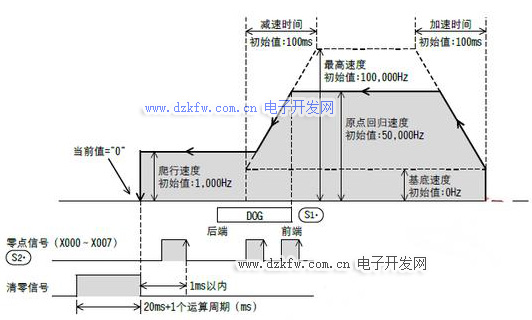
原点是设置标志位,在装个传感器感应到位信号,到了原点D8340清零。 设置正负极限位,近点和原点,每个传送带上面都装个零点传感器接受感应信号,这个零点信号感应器还有要求需要接入X0-X7中具有高速响应的输入点中,这样信号才会第一时间传送到PLC中。 在到原点之前会检测到近点,然后减速直到检测到原点信号上升沿停。
一般到了极限位就会反转。
三菱PlC控制伺服马达转动距离程序如何写
说到位置控制模式那么我们就想到了定位控制指令。 定位指令一、DSZR / 带DOG搜索的原点回归概要:执行原点回归,使机械位置与可编程控制器内的当前值寄存器一致的指令。 DOG搜索功能的对应允许使用近点DOG和零点信号的原点回归,但是不可以对零点信号计数后决定原点。 二、ZRN /原点回归概要:执行原点回归使机械位置与可编程控制器内的当前寄存器一致的指令该指令是PLC与伺服驱动器配合工作时,用指定脉冲速度和脉冲输出端口,让执行机构向动作原点(DOG)移动,直到遇到原点信号满足条件为止。 三、PLSV / 可变速脉冲输概要:输出带旋转方向的可变速的脉冲指令四、DRVI / 相对定位概要:以相对驱动方式执行单速定位的指令,用带正/负的符号指定从当前位置开始的移动距离的方式,也称为增量(相对)驱动方式只有晶体管输出PLC才能使用该指令。 五、DRVA/ 绝对位置该指令是按指定的端口、频率和运行方向输出脉冲,令伺服执行机构运动到指定目的点。 只有晶体管输出PLC才能使用该指令。 所谓的绝对方式就是以原点为基准指定位置(绝对地址)进行定位,起点在哪里都没有关系,就是说与现在我停在哪地方无关,只与原点做比较,比如我现在在100的位置,我们输入100,是不会动的,输入500,会向前走400,输入-500,会向后退600,因为只和原点做比较,现在在100的位置,输入100与原点比较无变化,输入500,源原点做比较还差400,所以往前走400,输入-500,与原点比较,发现不仅要走100回到原点还要往回再走500加起来就是600。 两个指令都带有加减速时间、基底、最高速度设置,而且都有脉冲发送完成标志位M8029,其他的相关软元件与PLSV类似。 这里主要强调下旋转方向的变换,对于DRVI,当脉冲输出值(相对地址)为正数时正转,脉冲寄存器的脉冲当前值增加,当脉冲输出值为负时反转,脉冲寄存器的脉冲当前值减少,比如设置脉冲输出数为,则电机正转,脉冲输出数为-5000时反转。 对于DRVA,它的正反转需要由脉冲输出值(绝对地址)与当前寄存器中的大小做比较,比如当前寄存器为1000,我们设置脉冲输出数为4000,则电机正转,如果设置脉冲输出数为500,则电机反
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论