一、引言
步进电机作为一种精确控制角度和位置的驱动设备,广泛应用于各种自动化设备和工业控制系统中。
步进电机控制器作为步进电机的核心控制部件,其性能直接影响到整个系统的运行精度和稳定性。
本文将详细介绍步进电机控制核心及步进电机控制器原理图,帮助读者更好地理解其工作原理和应用。
二、步进电机简介
步进电机是一种将电脉冲信号转换为角位移的驱动装置。
其特点是可以精确地控制旋转的角度和速度,因此广泛应用于数控机床、精密仪器、机器人等领域。
步进电机通常由电机本体、驱动电路和控制电路三部分组成。
三、步进电机控制器核心功能
步进电机控制器的主要功能是根据输入的控制信号,精确控制步进电机的转速、转向和停止位置。其核心功能包括:
1. 脉冲计数:接收来自控制器的脉冲信号,根据脉冲数量控制电机的转动角度。
2. 转速控制:通过调节脉冲信号的频率,控制电机的转速。
3. 正反转控制:通过改变脉冲信号的极性,实现电机的正反转。
4. 保护功能:具有过流、过温等保护功能,确保电机和控制器安全。
四、步进电机控制器原理图解析
步进电机控制器原理图主要包括输入信号处理、驱动电路和电机本体三部分。下面分别进行解析:
1. 输入信号处理:
输入信号处理部分主要负责接收来自控制器的脉冲信号和控制信号。
脉冲信号通常为串行或并行输入,经过整形、滤波等处理,确保信号的稳定性和可靠性。
控制信号包括启动、停止、正反转等信号,经过逻辑处理后,用于控制电机的运行状态。
2. 驱动电路:
驱动电路是步进电机控制器的核心部分,主要负责将控制信号转换为适合电机驱动的电流信号。
驱动电路通常采用H桥或全桥拓扑结构,以实现电机的正反转和转速调节。
驱动电路还具备电流调节功能,通过调节电机的电流大小,控制电机的扭矩和转速。
3. 电机本体:
电机本体是步进电机的执行部分,根据控制信号的指令,完成旋转动作。
电机本体的旋转角度和速度由控制信号的脉冲频率和数量决定。
电机本体的性能直接影响到整个系统的运行精度和稳定性。
五、步进电机控制器的工作原理
步进电机控制器的工作原理可以概括为以下几个步骤:
1. 接收控制信号:控制器通过接口电路接收来自上位机的控制信号,包括脉冲信号、方向信号、使能信号等。
2. 信号处理:控制器对接收到的控制信号进行整形、滤波、逻辑处理等,提取出有效的指令信息。
3. 产生驱动信号:根据指令信息,控制器产生适合电机驱动的电流信号,通过驱动电路放大后,驱动电机本体转动。
4. 监控和保护:控制器实时监控电机的运行状态,包括转速、电流等参数,当出现异常时,自动采取保护措施,如降低电流、停止驱动等,确保电机和控制器安全。
六、应用与实例
步进电机控制器广泛应用于各种自动化设备中,如数控机床、激光切割机、印刷机械等。
以数控机床为例,步进电机控制器根据数控系统发出的指令,精确控制机床的进给运动,实现高精度的加工。
通过配置不同的控制器参数,可以实现不同的运动模式和加工要求。
七、结论
本文详细介绍了步进电机控制核心及步进电机控制器原理图,包括步进电机的简介、控制器核心功能、原理图解析、工作原理以及应用实例。
通过本文的学习,读者可以更好地理解步进电机控制器的工作原理和性能特点,为实际应用提供指导。
步进电机驱动器基本原理
步进电机驱动器的基本原理主要基于单极性直流电源的供电方式。 当对电机的各个相绕组按照特定的时序进行通电,就能实现电机的逐步旋转。 如图1所示,四相反应式步进电机的工作原理是通过控制SB、SA、SC和SD四个开关来实现的。 在初始状态,当SB打开电源,SA、SC、SD关闭,B相与转子的0、3号齿对齐,同时1、4号齿与C、D相绕组产生错位。 接着,当SC接通电源,SB、SA、SD断开,C相的磁力线作用于转子,使其转动,1、4号齿与C相对齐,而0、3号齿与A、B相产生错位,2、5号齿与A、D相绕组相应错位。 这个过程反复,通过A、B、C、D四个相的轮流供电,转子会按照这四个方向交替转动。 四相步进电机根据通电顺序的不同,有单四拍、双四拍和八拍三种工作模式。 单四拍与双四拍步距角相同,但单四拍的转动力矩较小。 八拍方式的步距角是前两者的一半,因此它在保持较高转动力矩的同时,提升了控制精度。 驱动器实质上是开关的智能集成,它接收来自上位机的脉冲信号,按照指令的顺序控制电机各相的通电,从而驱动电机运转。 图2展示了单四拍(a)、双四拍(b)和八拍(c)的工作时序波形。
步进电机驱动器的原理是什么?
步进电机在控制系统中具有广泛的应用。 它可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、或角位移发生器等。 步进电机驱动器选型指南一、步进电机驱动器工作模式分类步进电机驱动模式基本有三种:整步、半步、细分。 其主要区别在于电机线圈电流的控制精度(即激磁方式)。 整步驱动同一种步进电机既可配整/半步驱动器也可配细分驱动器,但运行效果不同。 步进电机驱动器按脉冲/方向信号对两相步进电机的两个线圈循环激磁,这种驱动方式的每个脉冲将使电机移动一个基本步距角,即1.8度(标准两相电机的一圈共有200个步距角)。 半步驱动(2细分)在单相激磁时,电机转轴停至整步位置上,驱动器收到下一脉冲后,如给另一相激磁且保持原来相继处在激磁状态,则电机转轴将移动半个步距角,停在相邻两个整步位置的中间。 如此循环地对两相线圈进行单相然后双相激磁步进电机将以每个脉冲0.9度的半步方式转动。 细分驱动细分驱动模式具有低速振动极小和定位精度高两大优点。 可运用在有时需要低速运行或定位精度要求小于0.9度的步进电机应用方案中。 其基本原理是对电机的两个线圈分别按正弦和余弦形的台阶进行精密电流控制,从而使得一个步距角的距离分成若干个细分步完成。 如图所示。 例如8细分的驱动方式下步进电机驱动器接收200*8=1600个脉冲信号步进电机转动一圈。
步进电机的控制有哪些实现方法
表控TPC4-4TD等系列控制器可以控制单个或多个步进电机,具有多路脉冲输出,采用表格设置汉字显示的方法设置,可以实现方向控制、长度控制、角度控制、速度控制、位置控制等等。外观如下图:
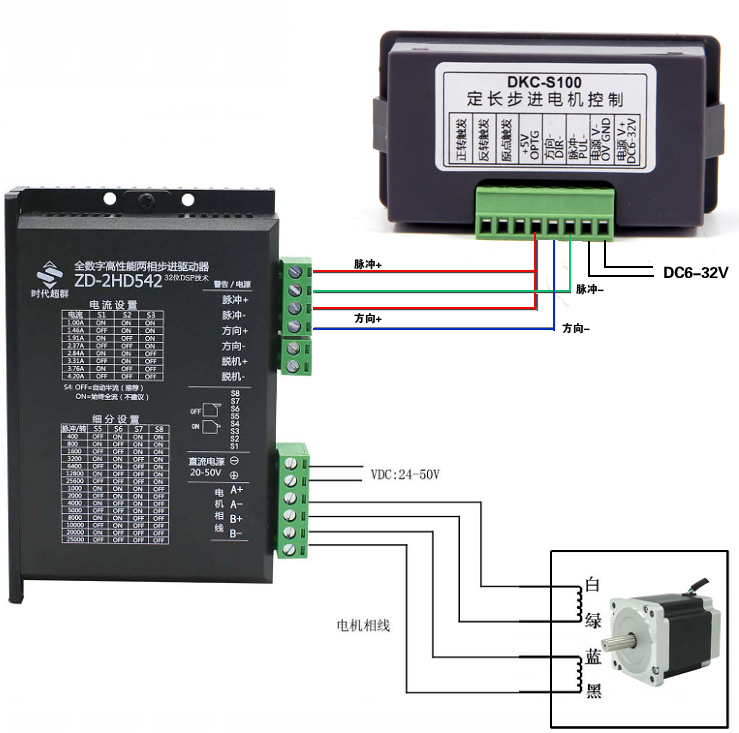
接线图如下:
这是单轴步进控制的接线原理图。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论