引言
永磁电动机(PMM),又称稀土永磁电动机,已成为现代工业中广泛应用的关键部件。它的高效率、高功率密度以及无刷设计使其成为电动汽车、风力涡轮机和工业机械的理想选择。本文将深入探究永磁电动机的内部结构和工作原理,揭示其令人惊叹的性能和应用潜力。结构
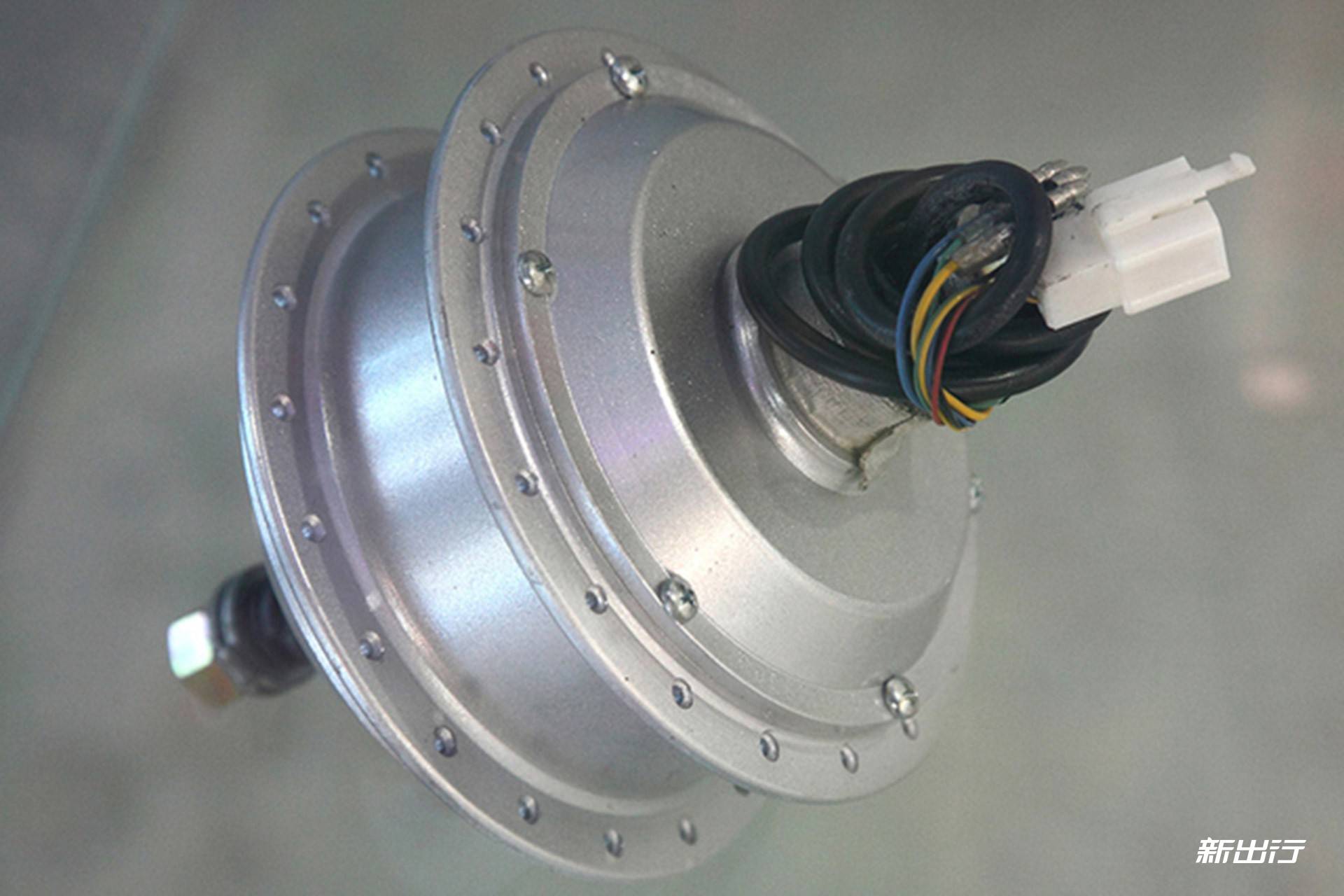
永磁电动机主要由以下部件组成:定子:由定子线圈组成,通过电磁铁产生磁场。转子:由永磁体组成,产生恒定磁场。气隙:定子线圈和转子永磁体之间的狭窄空间。轴承:支承转子并允许其旋转。端盖:密封电动机并保护其内部部件。定子
定子线圈通常由铜线绕制在铁芯上。铁芯具有高的导磁率,可以将磁场集中在气隙中。定子线圈排列在定子上,形成一系列磁极。转子
转子上的永磁体排列成相反的磁极,形成一个旋转磁场。永磁体可以由钕铁硼(NdFeB)、钐钴(SmCo)或铁氧体等材料制成。气隙
气隙是定子和转子之间的狭窄空间。磁场通过气隙从定子传输到转子,产生扭矩和运动。
原理
永磁电动机的基本工作原理是基于洛伦兹力。洛伦兹力是指带电粒子在磁场中运动时所受到的力。当电流流过定子线圈时,产生磁场。该磁高性能、高效且可靠的电机,在现代工业中发挥着至关重要的作用。通过深入了解它们的内部结构和工作原理,我们可以充分利用它们的优势,为各种应用提供创新的解决方案。随着技术的不断发展,永磁电动机有望在可再生能源、交通运输和工业自动化领域继续发挥不可或缺的作用。永磁无刷电动机可以看做是一台用电子换相装置取代机械换相的直流电动机,如图1 所示,永磁直流无刷电动机主要由永磁电动机本体、转子位置传感器和电子换向电路组成。 无论是结构或控制方式,永磁直流无刷电动机与传统的直流电动机都有很多相似之处:用装有永磁体的转子取代有刷直流电动机的定子磁极;用具有多相绕组的定子取代电枢;用由固态逆变器和轴位置检测器组成的电子换向器取代机械换向器和电刷。 转子位置传感器有光电式、磁敏式和电磁式三种类型。 采用光电式位置传感器的无刷直流电动机,在定子组件上按一定位置配置了光电传感器件,转子装有遮光板,光源为发光二极管或小灯泡。 转子旋转时,由于遮光板的作用,定子上的光敏元器件将会按一定频率间歇发出脉冲信号。 磁敏式位置传感器是指它的某些点阐述随周围磁场按一定规律变化的半导体敏感元件,其基本原理为霍尔效应和磁阻效应。 磁敏元件的主要工作原理是电流的磁效应,主要是霍尔效应。 采用磁敏式位置传感器的无刷直流电动机,其磁敏传感器件(如霍尔元件、磁敏二极管、磁敏三极管、磁敏电阻器或专用集成电路)装载定子组件上,用来检测永磁体、转子旋转时产生的磁场变化。 采用电磁式位置传感器的无刷直流电动机,是在定子组件上安装电磁传感器部件,当永磁体转子位置发生变化时,电磁效应将使电磁传感器长生高频调制信号(其幅值随转子位置的变化而变化)。 几年来还出现了无位置传感器的无刷直流电动机,词中电动机利用定子绕组的反电动势作为转子磁铁的位置信号,该信号检出后,经数字电路处理,送给逻辑开关电路去控制无刷直流电动机的换向。 由于它省去了位置传感器,是的无刷电动机的结构更加紧凑,所以应用日趋广泛。 电子换向电路由功率变换电路和控制电路两大部分组成,它与位置传感器相配合,控制电动机定子各相绕组的通电顺序和时间,起到与机械换向类似的作用。 当系统运行时,功率变换器接受控制电路的控制信息,间该系统工作电源的功率以一定的逻辑关系分配给直流无刷电动机定子上的各相绕组,以便使电动机产生持续不断的转矩。 逆变器将直流电流转换成交流电流想电动机供电,与一般逆变器不同,它输出频率不是独立调节的,而是受控于转子位置信号,是一个“自控式逆变器”。 永磁无刷电动机BLDCM 由于采用自控式逆变器,电动机输入电流的频率和电动机转速始终保持同步,电动机和逆变器不会产生振荡和失步,这也是永磁无刷电动机BLDCM 的显著优点之一。 电动汽车电机电动机各项绕组导通的顺序和时间主要取决于来自位置传感器的信号,但位置床干起所产生的信号一般不能直接用来驱动功率变换器的功率开关元件,往往需要经过控制电路进行逻辑处理、隔离放大后才能驱动功率变换器的开关元件,往往需要经过控制电路进行逻辑处理、隔离方法后才能驱动功率变换器的开关元件。 驱动空盒子电路的作用是将位置传感器检测到的转子位置信号进行处理,按一定的逻辑代码输出,去触发功率开关管。 永磁无刷直流电动机的工作原理永磁无刷直流电动机的控制系统主要有永磁无刷直流电动机、直流电压、逆变器、位置传感器和控制器几部分组成,采用“三相六拍—120°方波型”驱动。 如图所示5.21所示。 永磁刷刷直流电动机通过逆变器功率管按一定的规律导通、关断,使电动机定子电枢产生按60°电角度不断前进的磁势,带动电动机转子旋转来实现的。 分析如图5.21所示。 图a是理想条件下的电枢各相反电势和电流,每个功率管导通120°电角度,互差60°电角度,当功率管V3和V4导通时,电动机的V和—U(电流流进绕组方向为正向)相通(参考图1)。 定子电枢合成磁势为图b所示的Fa5;若功率管V3关断,功率管V5导通,此时电动机的W相和—U相通电,电枢合成磁势变为Fa5,Fa5 比Fa4顺时针前进了60°电角度。 由此可知,定子电枢产生的磁势将随着功率管有规律地不断导通和关断,并按60°电角度不断地顺时针转动。 逆变器功率管共有六种出发组合状态,每种出发组合状态只有与确定的转子位置或发电动机波形相对应,才能产生最大的平均电磁转矩。 当两个磁势向量的夹角为90°是,相互作用力最大。 而电子电枢产生的磁势是以60°电角度在前进,因此在每种出发模式下,转子磁势与定子磁势的夹角在60°~120°范围变化才能产生最大的平均电磁转矩。 如图c所示,假如在t1时刻,转子的此时Fj处于线圈U、X平面内,且使转子顺时针旋转,此时应该导通功率管V5和V4,使定子的合成磁势为Fa5与Fj的夹角成120°。 转子在Fa5与Fj相互作用产生电磁转矩的作用下顺时针旋转,到t3时刻Fa5与Fj的夹角成60°,此时关断功率管V4,导通功率管V6,定子合成磁势为Fa6,与Fj的夹角成120°,两者产生的电磁转矩使转子进一步旋转。 永磁无刷电动机控制理论的发展 交流电机是一个强耦合、非线性、多变量系统:非线性控制通过非线性状态反馈和非线性变换,实现系统的动态解耦和全局线性化,将非线性、多变量、强耦合的交流电动机系统分解为两个独立的线性单变量系统。 其中转子磁链子系统由两个惯性环节组成。 两个子系统的调节按线性控制理论分别设计,以使系统达到预期的性能指标。 但是,非线性系统反馈线性化的基础是已知参数的电动机模型和系统的精确测量或观测,而电机在运行中,参数受各个因素的影响会发生变化,磁链观测的准确性也很难论证,这些都会影响系统的鲁棒性,甚至造成系统性能恶化。 目前这种控制方法仍有待进一步完善。 滑模变结构控制是变结构控制的一种控制策略,它与常规控制的根本区别在于控制的不连续性,即一种使系统“结构”随时变化的开关特性。 其主要特点是,根据被调量的偏差及其导数,有目地的使系统沿设计好的“滑动模态”轨迹运动。 这种滑动模态是可以设计的,且与系统的参数及扰动无关,因而使系统具有很强的鲁棒性。 另外,滑模变结构控制不需要任何在线辨识,所以很容易实现。 在过去10多年里,将滑模变结构控制应用于交流传动一直是国内外学者的研究热点,并已取得了一些有效的结果。 但滑模变结构控制本质上的不连续开关特性使系统存在“抖振”问题。 主要原因是:①对于实际的滑模变结构系统,其控制力总是受到限制的,从而使系统的加速度有限;②系统的惯性、切换开关的时间空间滞后及状态检测的误差,特别对于计算机的采样系统,当采样时间较长时,形成“准滑模”等。 所以,在实际系统中“抖振”必定存在且无法消除,这就限制了它的应用。 ?
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论