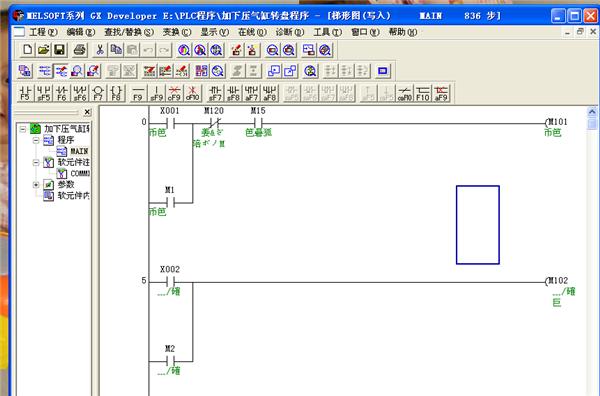
一、引言
PLC(可编程逻辑控制器)在现代工业控制系统中扮演着至关重要的角色。
PLC程序错乱是一个常见的问题,可能导致设备无法正常运行,生产效率下降等后果。
本文将详细介绍PLC程序错误的原因,并提供相应的修复策略,帮助工程师和技术人员更好地应对此类问题。
二、PLC程序错误原因
1. 硬件故障:PLC硬件故障可能导致程序运行出错。例如,CPU模块损坏、内存故障、电源问题等。这些故障可能导致程序无法正确执行或产生错误的结果。
2. 软件缺陷:软件缺陷是PLC程序错误的一个重要原因。这包括编程错误、算法错误、语法错误等。版本不兼容或软件更新问题也可能导致程序出错。
3. 外部干扰:PLC系统可能受到外部干扰,如电磁干扰、电源波动等,导致程序运行不稳定或产生错误。
4. 人为因素:人为因素也是导致PLC程序错误的一个重要原因。这包括编程过程中的疏忽、操作不当、错误的参数设置等。不恰当的维护和管理也可能导致程序出错。
三、修复策略
1. 排查硬件故障:在发现PLC程序出错时,首先应对硬件进行检查。检查CPU模块、内存、电源等是否正常工作。如有故障,应及时更换或修复。
2. 检查软件问题:在确认硬件无故障后,应检查软件问题。检查程序代码是否有语法错误、逻辑错误等。同时,确保使用的软件版本与PLC硬件兼容,并关注软件更新信息,及时修复已知问题。
3. 消除外部干扰:针对外部干扰问题,应采取相应的措施。例如,加强电磁屏蔽,稳定电源供应等。还应检查PLC系统的接地情况,确保接地良好,以减小外部干扰的影响。
4. 人为因素处理:对于人为因素导致的PLC程序错误,应加强培训和管理。对工程师和技术人员进行专业培训,提高编程技能和经验。同时,建立完善的操作规范和管理制度,确保操作人员按照正确的方法和步骤进行编程和操作。
5. 增加冗余设计:为了提高PLC系统的可靠性和稳定性,可以采用冗余设计。例如,使用双CPU模块、设置备用电源等。在发生故障时,冗余设计可以确保系统继续运行,降低生产损失。
6. 使用仿真测试:在PLC程序开发过程中,可以使用仿真测试来验证程序的正确性。通过模拟实际运行环境,检测程序的逻辑是否正确,以及是否存在潜在的问题。仿真测试可以帮助工程师在程序投入实际运行前发现并修复错误。
7. 记录与分析:建立完善的PLC程序错误记录与分析机制。每次发生错误时,详细记录错误现象、原因和处理方法。通过对错误记录进行分析,总结经验教训,提高应对PLC程序错误的能力。
四、总结
PLC程序错误是一个常见的问题,可能导致严重的生产损失。
本文详细分析了PLC程序错误的原因,包括硬件故障、软件缺陷、外部干扰和人为因素等。
为了应对这些问题,本文提出了相应的修复策略,包括排查硬件故障、检查软件问题、消除外部干扰、加强培训和管理、增加冗余设计、使用仿真测试和记录与分析等。
希望本文能够帮助工程师和技术人员更好地应对PLC程序错误问题,提高生产效率和系统稳定性。
什么是CAP定理?程序员必懂CAP定理详解!
面对可能出现的网络延迟,不可预估的请求流量等情况,设计一个分布式系统,我们通常围绕系统高可用,数据一致性的目标去规划和实现,想要完全实现这个目标,却并非易事。 由此,分布式系统领域诞生了一个基本定理,即CAP定理,用于指导分布式系统的设计,从系统高可用,数据一致性,网络容错三个角度将分布式系统的特性抽成一个分区容错一致性模型。 这样一来,让系统设计者只需根据业务场景特点,进行权衡设计适合业务场景的分区容错一致性模型即可,很大程度简化了分布式系统设计的难度。
也因此,CAP定理是架构师所必须要掌握的内容,它影响着架构师对分布式系统的技术选型,技术决策。 既然如此重要,接下来,我们就一起学习下CAP定理吧。
什么是CAP定理?CAP定理最初是由加州大学伯克利分校的计算机科学家埃里克·布鲁尔(EricBrewer)在2000年的ACMPODC上提出的一个猜想,也因此被叫做布鲁尔定理。 后来在2002年,麻省理工学院的赛斯·吉尔伯特(SethGilbert)和南希·林奇(NancyLynch)发表了CAP定理的证明,让它成为分布式系统领域公认的一个定理。
CAP定理指出了,在一个跨区域网络连接,共享数据的分布式系统中,一致性(Consistency),可用性(Availability)和分区容错性(PartitionTolerance)这三个约束属性最终只能同时满足二个。
下面是关于这三个属性的简单描述:
一致性:客户端进行读操作得到的数据永远是最近一次写入的数据,要求了对数据读写的强一致性。
可用性:客户端的请求在限定时间内总能从非故障的系统节点得到正常的响应,其中不能有超时,不能出错如502之类。
分区容错性:就是出现网络分区现象,即节点间无法正常通信,数据同步出现延时等情况时,系统仍能继续提供服务。
需要注意的是,CAP描述了一个常规的分布式系统场景:有网络连接,且数据跨节点进行共享。 如果在整个系统中,数据只有一份,并且其他节点没有对应的副本,也不需要进行跨节点的数据共享,这样分布式系统就不是CAP关心的对象了,也谈不上结合CAP定理去设计和实施。
深入认识CAP定理了解CAP基本概念之后,我们再来分别对C,A,P三个属性进一步学习下,加深对CAP的理解。
C:一致性这里的一致性从不同角度有着各自的描述方式,在分布式系统中表现是每个节点的数据是相同;而对于客户端,表现是读操作所得到的结果永远是最新写入的。 其中需要明确的是,对于分布式系统节点来说,是可能出现某个时刻拥有不同的数据的情况:如果在某个节点执行原子性操作时,对于执行过程中的节点数据跟其他节点就并不完全一致,只有原子性操作执行完成后,节点的数据才会继续保持同步。 比如常见的事务操作,只有事务提交后,客户端才能读取到事务写入的数据,失败则回滚为旧的数据,不会出现读取事务中间写入数据的情况。
一致性要求了在分布式环境下的操作要就像在单机上完成的一样,当客户端发起写请求时,收到写请求的节点会及时响应,并将更新的数据同步到另一个节点,保证数据一致性。具体的工作流程,如下所示:
客户端向节点1发送写操作,将数据X更新为1,
更新操作成功,系统将更新的数据从节点1同步到节点2,将节点2的旧数据X也更新为1。
客户端再向节点2发送读操作获取数据X时,就会得到X最新的值:1。
一致性强调了数据的强一致,这一点要求对于一些系统可以说是十分重要的。 比如电商系统的库存扣减,金融系统的转账扣款等场景,任何出现一致性的问题,都可能会造成很严重的后果。
A:可用性介绍完一致性,再来看下可用性,虽然可用性概念相对简单,但重要程度跟一致性一样。 要让系统满足可用性,就是要保证无论除了所有节点出现故障的情况外,系统都能返回有效的响应,允许响应给客户端是旧的数据,但不能出现响应失败,超时的情况。
可用性强调的是服务可用,但不保证数据的正确性。 用一个简单的例子来描述分布式系统的可用性如下:允许客户端向节点1或者节点2发起读操作,当其中某一个节点故障了,不管节点间数据是否一致,只要有节点服务能收到请求,就响应X的值,这样就说明这两个节点服务是满足可用性。
在可用性的描述,还值得一提的是关于什么算有效的响应。 要返回有效的响应,不能超时,也不能出错,结果不一定是正确的,比如返回了旧数据,但是客户端接收到后是能进行正常业务处理的。
P:分区容错性讲完C和A之后,最后再讲一下P:分区容错性。 由于分布式系统多个节点往往部署在多个网络环境下进行相互通信,就难免出现一些网络故障,如网络丢包,网络消息延迟,网络中断等情况,会导致节点间的通信出现问题,数据同步操作无法完成,分区容错性就要求了系统即使在网络分区出现的情况下,能仍继续对客户端提供服务。
因为分布式系统与单机不同,它涉及到了多节点间的通信和数据交互,避免不了网络问题,如果没有分区容错性,就意味着系统不允许出现节点间的通信出现任何错误,错误就意味着系统不可用,这在绝大数系统中无法接受的。 因此对节点间的分区故障容错是必须要考虑的,也是CAP定理中分区容错性通常首先要保证的原因。
如何应用CAP定理了解完CAP定理的一致性(C),可用性(A)和分区容错性(P)之后,我们再来看下如何使用这个定理。 CAP定理指明了C,A,P三个属性无法同时满足,而在必有网络交互和数据同步的情况下,就一定会有延迟和数据丢失的情况,对于这种情况我们又必须接受且保证系统不能挂掉。 所以分区容错性是必须要保证的,剩下的就是在一致性(C)和可用性(A)之间做选择了。 选择了一致性,保证数据正确性,但也意味系统可能存在不可用的情况;而选择可用性,保证服务的高可用,但也意味数据可能出现不一致性的情况。 接下来就探讨下应用采用CP架构,AP架构所各自的特点,以及如何根据不同的分布式场景选择适合的架构策略。
CP对于CP架构的分布式系统来说,为了保证一致性,当出现网络分区后,如果节点1上数据X已经更新为2,但由于节点间数据同步的通道已经中断,节点1数据无法同步到节点2,节点2上的数据X还是1。 此时如果客户端访问节点2的数据X,节点2就需要返回错误,提示系统发生了错误,直到节点间的数据保持同步。 当然这样的处理方式明显违背了可用性的要求,因此在CAP定理只能满足CP。
如果一个分布式场景需要很强的一致性,或者能容忍系统长时间无响应但是数据要保持一致的情况,就比较适合使用CP架构设计对应的分布式系统。 这样的系统一旦发生网络分区会导致数据无法同步情况,就要牺牲系统的可用性,直到节点数据达到一致后再响应。 在开源社区中采用CP架构的应用不少,比如Redis,HBase,MongoDB,ZooKeeper,Etcd,Consul等都是放弃了一定可用性而选择CP属性。
AP如果采用AP架构设计的分布式系统,为了保证可用性,当网络分区发生后,同样节点1上数据X已经更新为2,但由于节点间数据同步的通道已经中断,节点1数据无法同步到节点2,节点2上的数据X还是1。 这是客户端访问节点2获取数据X时,收到是正常的响应,旧数据X=1,而实际上当前最新的数据X已经是2了,这里就不满足一致性的要求了,因此在CAP定理只能满足AP。
同样适合AP的场景有很多,比如一些查询系统,电商系统的商品查询等,大多数为了保证系统的可用性,而牺牲一定的数据一致性,这样也保证了用户体验,在开源界中采用AP模型的典型应用有Eurka,Cassandra。
必须三选二吗提到了CAP定理,大多数人都认为无论什么情况,分布式系统只能在C和A中选择一个。 但这里的前提是系统发生了网络分区情况,如果系统没有发生网络分区的情况,也就是说P不存在的时候,我们就没有必要放弃C或者A,因此进行架构设计时也应该考虑没有分区情况下如何保证CA。 除此之外,一个分布式系统不一定只能从AP与CP中做选择,内部不同模块所应对的场景也不同,完全有可能是一个模块采用AP架构,另一个模块采用CP架构。 作为优秀的架构师,不应该受到大多数人对CAP定理所认识的局限,设计出符合自身业务场景的分布式系统才是重中之重。
总结本文主要了解和认识CAP定理,以及每个C,A,P的含义,以及CAP定理的应用。 掌握CAP定理,对架构师来说非常重要。 因为对于分布式系统来说,网络故障在所难免,如何在出现网络故障的时候,维持系统按照正常的行为逻辑运行就显得尤为重要。 一个合格的架构师需要是能结合实际的业务场景和具体需求,基于CAP定理来进行权衡和设计可用且稳定的分布式系统。
参考资料CAPtheorem-Wikipedia
想成为架构师,你必须知道CAP理论
CAP定理:三选二,架构师必须学会的取舍
作者:程序员闻人如何用USS协议实现变频器和西门子的PLC如何进行通讯?
USS-INT指令详解EN: 初始化程序 USS_INIT 只需在程序中执行一个周期就能改变通信口的功能,以及进行其他一些必要的初始设置,因此可以使用 SM0.1 或者沿触发的接点调用 USS_INIT 指令; Mode: 模式选择,执行 USS_INIT 时 ,Mode 的状态决定 是否在 Port 0 上使用 USS 通信功能;= 1 设置 Port 0 为 USS 通信协议并进行相关初始化 0 恢复 Port 0 为 PPI 从站模式 Baud: USS 通信波特率。 此参数要和变频器的参数设置一致;= 2400 2400 bit/s4800 4800 bit/s9600 9600 bit/s bit/s bit/s bit/s bit/sActive: 此参数决定网络上的哪些 USS 从站在通信中有效。 详见下面的说明; Done: 初始化完成标志 Error: 初始化错误代码 孤陋寡闻,我从来没看过有DRV-CTRL这条指令USS-CTRL指令详解EN: 使用 SM0.0 使能 USS_CTRL 指令 RUN: 驱动装置的启动/停止控制= 0 停止 1 运行 此停车是按照驱动装置中设置的斜坡减速指电机停止 OFF2: 停车信号 2。 此信号为“1时,驱动装置将封锁主回路输出,电机自由停车 OFF3: 停车信号 3。 此信号为”1时,驱动装置将快速停车 F_ACK: 故障确认。 当驱动装置发生故障后,将通过状态字向 USS 主站报告;如果造成故障的原因排除,可以使用此输入端清除驱动装置的报警状态,即复位。 注意这是针对驱动装置的操作。 DIR: 电机运转方向控制。 其“0/1”状态决定运行方向 Drive: 驱动装置在 USS 网络上的站号。 从站必须先在初始化时激活才能进行控制 Type: 向 USS_CTRL 功能块指示驱动装置类型= 0 MM 3 系列,或更早的产品 1 MM 4 系列,SINAMICS G 110Speed_SP: 速度设定值。 速度设定值必须是一个实数,给出的数值是变频器的频率范围百分比还是绝对的频率值取决于变频器中的参数设置(如 MM 440 的 P2009) Resp_R: 从站应答确认信号。 主站从 USS 从站收到有效的数据后,此位将为“1一个程序扫描周期,表明以下的所有数据都是最新的 Error: 错误代码。 0 = 无出错。 其他错误代码请参考 Status: 驱动装置的状态字。 此状态字直接来自驱动装置的状态字,表示了当时的实际运行状态 详细的状态字信息意义请参考相应的驱动装置手册。 Speed: 驱动装置返回的实际运转速度值,实数。 是否频率值跟随设定值的规格化设定 Run_EN: 运行模式反馈,表示驱动装置是运行(为 1)还是停止(为 0) D_Dir: 指示驱动装置的运转方向,反馈信号 Inhibit: 驱动装置禁止状态指示(0 - 未禁止,1 - 禁止状态)。 禁止状态下驱动装置无法运行。 要清除禁止状态,故障位必须复位,并且 RUN, OFF2 和 OFF3 都为 0 Fault: 故障指示位(0 - 无故障,1 - 有故障)。 表示驱动装置处于故障状态,驱动装置上会显示故障代码(如果有显示装置)。 要复位故障报警状态,必须先消除引起故障的原因,然后用 F_ACK 或者驱动装置的端子、或操作面板复位故障状态。 此 USS_CTRL 功能块使用了 PZD 数据读写机制,传输速度比较快。 但由于它还是串行通信,而且还可能有多个从站需要轮询,因此无法做到”实时“响应。 要实现高要求的快速通信,应该使用 PROFIBUS-DP 等网络,同时更换主站为更高级的控制器。 也由于同样的原因,USS_CTRL 输入的控制信号需要一个合理的作用时间,以等待指令执行完成,过快速的变化可能会导致没有响应。 USS_CTRL 已经能完成基本的驱动装置控制,如果需要有更多的参数控制选项,可以选用 USS 指令库中的参数读写指令实现。
电脑开机显示“CPU fan error”:原因及修复措施详解
电脑开机屏幕显示“CPU fan error”故障解析及对策当电脑启动时,遇到CPU fan error的提示,可能源于多种问题。 首先,系统BIOS无法识别CPU风扇转速。 为解决这个问题,进入BIOS设置,将CPU FAN SPEED、CHASSIS FANSPEED和POWER FAN SPEED调整为IGNORED或N/A,通常会消除错误提示。
其次,风扇性能异常或转速不足也需关注。 长时间使用导致润滑油干涸,使风扇转速下降。 为确保散热,可在风扇内部添加润滑油,提高转速,以降低机箱内部温度,防止CPU过热。
电源连接问题也可能引发错误。 确保CPU风扇正确插入主板上的CPU_F接口,否则即使风扇工作正常,主板仍会报错。 通过调整插头位置,大部分问题可以得到解决。
最后,主板电池电力不足也可能触发提示。 移除并等待一段时间再安装COMS电池,进行放电恢复默认设置,然后在BIOS中使用默认配置即可解决。
总结:CPU fan error的出现可能源于硅胶缺失、灰尘积聚或硬件连接问题。通过上述方法,逐一排查并修复,通常能有效地解决这类问题。本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!



添加新评论