简介
PID(比例-积分-微分)控制器是一种广泛用于自动控制系统的反馈控制器。它通过测量系统的误差并使用误差的比例、积分和微分值来计算控制信号,从而将系统的输出值控制在期望值附近。PID 控制器的构成
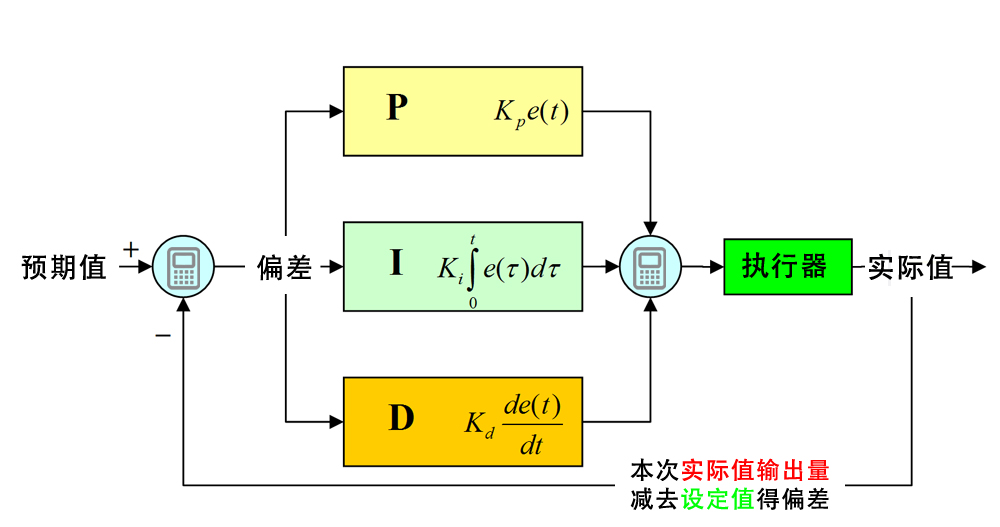
PID 控制器由以下三个部分组成:比例部分 (P):与误差成正比,用于快速响应误差变化。积分部分 (I):与误差的积分成正比,用于消除稳态误差(系统达到期望值后仍然存在的误差)。微分部分 (D):与误差的导数成正比,用于预测误差的变化并提前采取措施。PID 控制器的数学公式
PID 控制器的输出信号(u)由以下公式计算得出:```u = Kp e + Ki ∫edt + Kd de/dt```其中:Kp、Ki、Kd 为控制器的比例、积分、微分增益e 为误差(期望值 - 输出值)t 为时间PID 控制器的调谐
PID 控制器的性能受其增益值的影响。为了优化控制器的性能,需要对增益进行调谐。有几种调谐方法,包括:齐格勒-尼科尔斯法:一种基于系统响应的经典调谐方法。SIMC 法(假设积分法):一种基于优化技术的现代调谐方法。自动调谐:使用算法自动调整增益值。PID 控制器的优点
鲁棒性强,对系统参数变化不敏感。结构简单,易于理解和实现。响应速度可调,可以通过调整增益来满足不同控制需求。PID 控制器的缺点
可能存在超调(输出值超出期望值)。在系统具有大滞后或非线性时可能无法达到最佳控制效果。PID 控制器的应用
PID 控制广泛应用于各种工业和消费产品中,包括:温度控制位置控制速度控制流量控制压力控制PID 控制程序的编写
PID 控制程序可以使用各种编程语言编写。以下是使用 Python 语言编写的简单 PID 控制程序示例:```pythonimport timeclass PIDController:def __init__(self, Kp, Ki, Kd):self.Kp = Kpself.Ki = Kiself.Kd = Kdself.error = 0self.integral = 0self.derivative = 0def update(self, error, dt):self.error = errorself.integral += error dtself.derivative = (error - self.error) / dtreturn self.Kp error + self.Ki self.integral + self.Kd self.derivativePID 参数Kp = 1Ki = 0.1Kd = 0创建 PID 控制器controller = PIDController(Kp, Ki, Kd)设置期望值 setpoint = 100采样时间 (秒)dt = 0.1运行控制循环while True:获取当前输出值output = controller.update(setpoint - output, dt)执行控制操作...延迟下一个采样time.sleep(dt)```结论
PID 控制是自动控制系统中一项重要的技术。它简单、鲁棒且用途广泛,使其成为许多控制应用的理想选择。通过仔细的调谐,PID 控制可以显着提高系统的控制性能,从而提高效率、安全性和其他关键指标。本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论