三轴运动平台工作原理
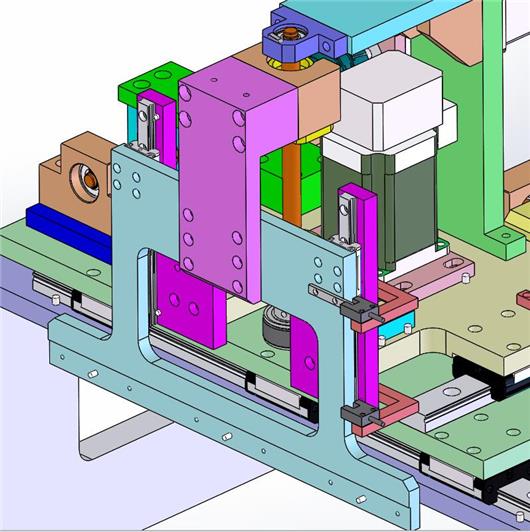
三轴运动平台是利用三根直线导轨和三个伺服电机构成,通过 PLC 控制程序,实现 X、Y、Z 三个轴的运动。其中,X 轴负责左右移动,Y 轴负责前后移动,Z 轴负责上下移动。
三轴运动平台的运动原理如下:
- PLC 程序根据运动指令,计算出各轴的运动轨迹和速度。
- PLC 程序将计算出的数据发送给伺服驱动器。
- 伺服驱动器根据 PLC 程序的数据,控制伺服电机的运动。
- 伺服电机通过直线导轨带动三轴运动平台运动。
三轴运动 PLC 程序设计
三轴运动 PLC 程序设计主要是根据三轴运动平台的工作原理,编写出控制 PLC 的程序。PLC 程序主要包括以下几个部分:
- 运动指令解析
- 运动轨迹计算
- 伺服驱动器控制
- 运动状态监控
- 故障处理
运动指令解析
运动指令解析是PLC 程序的第一步,主要是将用户输入的运动指令解析成 PLC 程序可以理解的数据。运动指令一般包括以下几个参数:
- 运动轴
- 目标位置
- 运动速度
- 运动加速度
- 运动模式
运动轨迹计算
运动轨迹计算是 PLC 程序的第二步,主要是根据运动指令,计算出各轴的运动轨迹和速度。运动轨迹计算一般采用插补算法,将直线运动和圆弧运动分解成多个小的直线段或圆弧段,再根据各段的长度和速度计算出各段的运动时间。通过对各段运动时间的累加,即可得到各轴的运动轨迹和速度。
伺服驱动器控制
伺服驱动器控制是 PLC 程序的第三步,主要是根据运动轨迹计算的数据,控制伺服驱动器的运动。PLC 程序一般通过 MODBUS 或 CANopen 等通信协议,将运动指令发送给伺服驱动器。伺服驱动器根据 PLC 程序的数据,控制伺服电机的运动。
运动状态监控
运动状态监控是 PLC 程序的第四步,主要是监控各轴的运动状态。PLC 程序一般通过伺服驱动器的状态寄存器,获取各轴的运动位置、速度、加速度等信息。通过对这些信息的分析,可以判断各轴的运动是否正常。
故障处理
故障处理是 PLC 程序的第五步,主要是处理运动过程中出现的各种故障。PLC 程序一般通过伺服驱动器的故障寄存器,获取故障信息。通过对故障信息的分析,可以判断故障类型。一旦发生故障,PLC 程序会采取相应的措施,如停止运动、报警等。
三轴运动 PLC 程序应用
三轴运动 PLC 程序在工业自动化领域有着广泛的应用,例如:
- 数控机床
- 机器人
- 包装机械
- 印刷机械
- 纺织机械
三轴运动 PLC 程序设计是一项复杂的技术,需要对运动控制、PLC 编程、伺服驱动器等方面有深入的了解。随着工业自动化技术的发展,三轴运动 PLC 程序在工业自动化领域的应用将越来越广泛。
可编程控制器(PROGRAMMABLE CONTROLLER,简称PC)。 与个人计算机的PC相区别,用PLC表示。 PLC是在传统的顺序控制器的基础上引入了微电子技术、计算机技术、自动控制技术和通讯技术而形成的一代新型工业控制装置,目的是用来取代继电器、执行逻辑、记时、计数等顺序控制功能,建立柔性的程控系统。 国际电工委员会(IEC)颁布了对PLC的规定:可编程控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。 它采用可编程序的存贮器,用来在其内部存贮执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字的、模拟的输入和输出,控制各种类型的机械或生产过程。 可编程序控制器及其有关设备,都应按易于与工业控制系统形成一个整体,易于扩充其功能的原则设计。 PLC具有通用性强、使用方便、适应面广、可靠性高、抗干扰能力强、编程简单等特点。 可以预料:在工业控制领域中,PLC控制技术的应用必将形成世界潮流 PLC程序既有生产厂家的系统程序,又有用户自己开发的应用程序,系统程序提供运行平台,同时,还为PLC程序可靠运行及信息与信息转换进行必要的公共处理。 用户程序由用户按控制要求设计。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论