伺服电机是一种高精度、高响应性的电机,广泛应用于工业自动化、机器人和医疗设备等领域。为了确保伺服电机能够高效工作,正确设置电机参数至关重要。本文将提供一份详细的伺服电机参数设置指南,逐步指导您优化电机性能,提高其效率。
步骤 1:获取电机参数
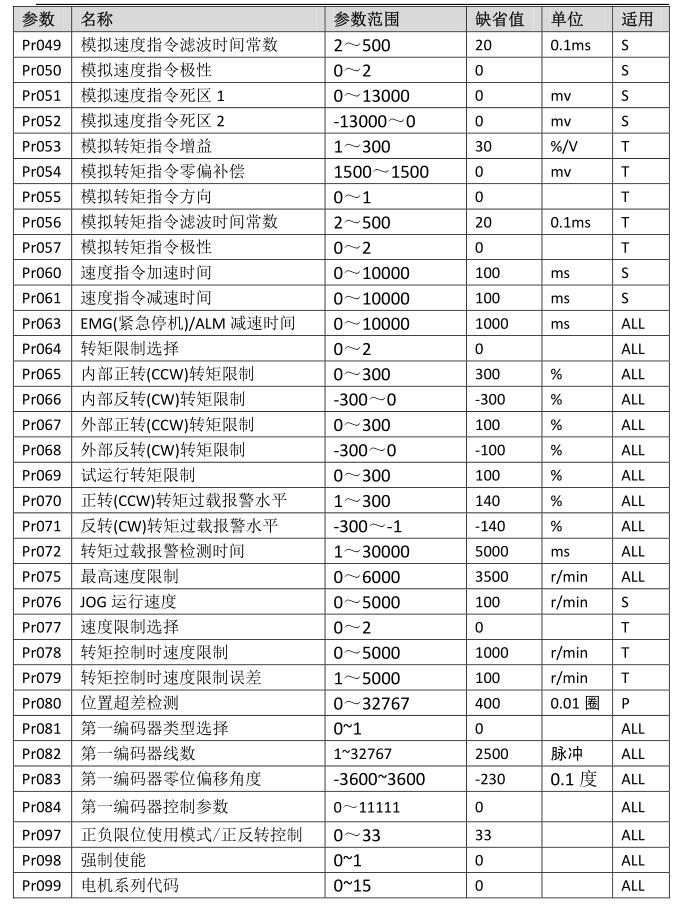
第一步是获取用于设置的伺服电机参数。这些参数通常可在电机制造商提供的技术文档中找到。主要包括以下参数:- 额定速度
- 额定扭矩
- 额定电流
- 惯量
- 背电动势常数 (Ke)
- 转矩常数 (Kt)
步骤 2:选择驱动器
选择与伺服电机兼容的驱动器。驱动器负责将控制信号转换为电机实际工作所需的功率。考虑以下因素:- 输出电流容量
- 额定电压
- 控制接口(例如,脉宽调制 (PWM) 或模拟电压)
步骤 3:设置速度环参数
速度环负责控制电机的速度。主要参数包括:- 速度环比例增益 (Kp):影响速度环响应速度。Kp 较高则响应速度更快,但过高会导致振荡。
- 速度环积分时间 (Ti):消除速度误差。Ti 较高则误差消除速度更快,但过高会导致积分饱和。
-
速度环微分时间 (Td):改善速度环稳定性。Td 较高则阻尼性能越好,但过参数 | 描述 | 单位 |
|---|---|---|
| 额定速度 | 电机可达到的最大速度 | rpm |
| 额定扭矩 | 电机可产生的最大扭矩 | Nm |
| 额定电流 | 电机正常工作所需的电流 | A |
| 惯量 | 电机转子的惯性 | kgm² |
| 背电动势常数 (Ke) | 电机产生的反向电压 | V/rad |
| 转矩常数 (Kt) | 将电能转换为机械能的比例 | Nm/A |
| 速度环比例增益 (Kp) | 影响速度环响应速度 | |
| 速度环积分时间 (Ti) | 消除速度误差 | s |
| 速度环微分时间 (Td) | 改善速度环稳定性 | s |
| 位置环比例增益 (Kp) | 影响位置环响应速度和精度 | |
| 位置环积分时间 (Ti) | 消除位置误差 | s |
| 位置环微分时间 (Td) | 改善位置环阻尼 | s |
| 电流环比例增益 (Kp) | 影响电流环响应速度 | |
| 电流环积分时间 (Ti) | 消除电流误差 | s |
结论
通过遵循这些步骤并参考提供的参数表,您可以正确设置伺服电机参数,优化其性能并提高其效率。适当的参数设置可确保电机平稳运行、响应迅速、精度高。定期检查和调整参数对于保持电机最佳状态至关重要,从而延长其使用寿命并提高其可靠性。
伺服的电子齿轮比是通过更改电子齿轮比的分倍频,来实现不同的脉冲当量。 伺服系统的精度是编码器的线数决定,但这个仅仅是伺服电机的精度。 在实际中连接不同的机械结构,如滚珠丝杠,蜗轮蜗杆副,螺距、齿数等参数不同,移动最小单位量所需的电机转动量是不同的。 电子齿轮比是匹配电机脉冲数与机械最小移动量的。 设置伺服的电子齿轮比需要知道,机械传动部分到电机之间的传动比,就是电机旋转一圈,机械部分转动多少。 伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。 扩展资料:在两齿轮节圆相切点P处,两齿廓曲线的公法线(即齿廓的受力方向)与两节圆的公切线(即P点处的瞬时运动方向)所夹的锐角称为压力角,也称啮合角。 对单个齿轮即为齿形角。 标准齿轮的压力角一般为20”。 在某些场合也有采用α=14.5° 、15° 、22.50°及25°等情况。 由于转子电阻大,与普通异步电动机的转矩特性曲线相比,有明显的区别。 它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。 因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。 参考资料来源:网络百科--伺服电机参考资料来源:网络百科--齿轮
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论