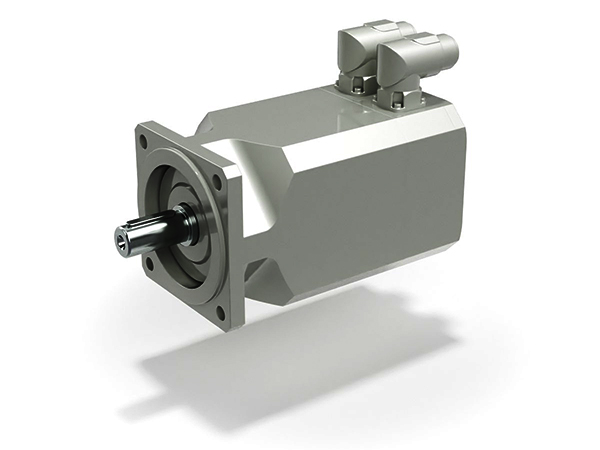

伺服电机广泛应用于机器人中,主要用于驱动关节的运动。
在机器人应用中,伺服电机需要满足以下要求:
- 频繁正反转短时运行
- 负载惯量大
- 控制速度快
这些要求对伺服电机的过载能力提出了很高的要求,包括过载扭矩和过载电流。
伺服电机过载能力
伺服电机的过载能力是指其在短时间内输出超过额定扭矩或电流的能力。
当伺服电机带载启动时,除了加载的惯量外,还存在动摩擦力和静摩擦力。
因此,伺服电机的实际启动扭矩为:
T
start
= J dω/dt + B
d
ω + T
f
- T start 为启动扭矩
- J为负载惯量
- dω/dt为角加速度
- B d 为动摩擦力系数
- ω为角速度
- T f 为静摩擦力
由上述公式可知,实际伺服电机在带载启动时,除了加载的惯量外,还存在摩擦力和负载的惯性力。
这些因素都会增加伺服电机的过载扭矩,因此伺服电机需要具备较强的过载能力。
伺服电机过载电流
伺服电机过载电流是指其在短时间内输出超过额定
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!





添加新评论