引言
伺服控制是一种反馈控制系统,它使用来自传感器的反馈信号来控制系统的输出。伺服控制系统广泛应用于各种行业中,包括机器人技术、自动化和医疗保健。伺服控制系统有多种不同的控制模式,每种模式都有自己的优点和缺点。了解不同的控制模式对于设计和部署高效的伺服控制系统至关重要。伺服控制模式
最常见的伺服控制模式有四种:- 位置控制模式
- 速度控制模式
- 扭矩控制模式
- 混合控制模式
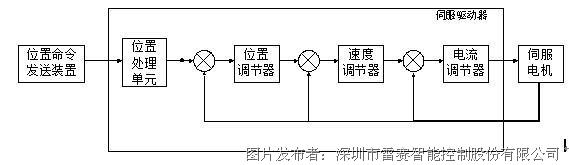
位置控制模式
位置控制模式是通过将目标位置和实际位置进行比较来控制伺服电机的位置。当目标位置发生变化时,伺服电机将调整其转速以达到该位置。位置控制模式适用于需要精确位置控制的应用,例如机器人和机器视觉系统。速度控制模式
速度控制模式是通过将目标速度和实际速度进行比较来控制伺服电机的速度。当目标速度发生变化时,伺服电机将调整其转矩输出以达到该速度。速度控制模式适用于需要精确速度控制的应用,例如传动带和输送系统。扭矩控制模式
伺服电机的控制方式:速度模式,力矩模式,位置模式。 1.速度模式,通过对电机驱动脉冲的改变来控制电机的运转速度。 比如舞台的灯光,可以加速也可以减速。 2.力矩模式,输出的力矩是恒定的。 例如数控线切割机,,能把切割机的转速和扭矩保持恒定,来完成机械加工。 还有机床上的进给轴也是力矩模式控制。 3.位置模式,可以精确的控制位置。 比如汽车组装车间的机械臂,通过精确的位置控制,机械臂才能到达指定的位置代替人工组装车辆。 不管是哪一种控制,都是由不同的伺服电机来完成基本的驱动。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论