引言
伺服控制是一种广泛用于工业自动化和机器人领域的控制技术。它使系统能够准确地遵循预定的参考轨迹,即使在存在外部干扰或负载变化的情况下。伺服控制模式是指用于控制伺服系统的不同策略,每种策略都有自己独特的优势和应用。
伺服控制模式的类型
位置控制模式
- 特性:该模式将系统的实际位置与参考位置进行比较,并产生一个误差信号来驱动执行器。
- 优势:高精度位置控制,快速响应。
- 应用:机械臂、线性滑轨。
速度控制模式
- 特性:该模式将系统的实际速度与参考速度进行比较,并产生一个误差信号来驱动执行器。
- 优势:精确的速度控制,高响应速度。
- 应用:纺织机械、传送带。
力矩控制模式
- 特性:该模式直接控制电机的力矩,而不依赖于位置或速度测量。
- 优势:高抗干扰性,保持恒定的力矩。
- 应用:夹持器、机器人关节。
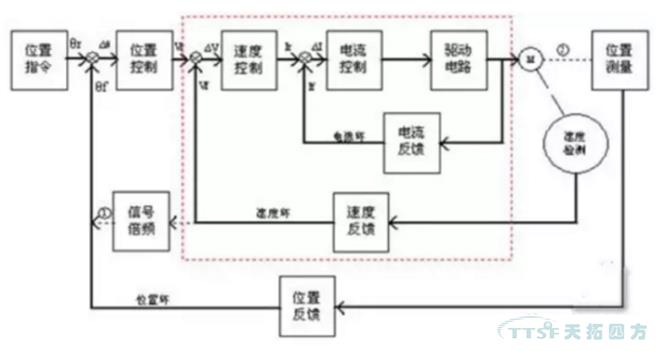
位置-速度控制模式
- 特性:该模式结合了位置和速度控制,在位置跟踪和快速响应之间取得平衡。
- 优势:高精度位置控制,同时保持较高的响应速度。
- 应用:工业机器人
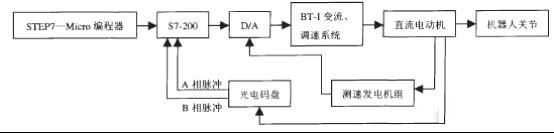
私服电机驱动器控制伺服电机的三种方法:速度控制模式,力矩控制模式,位置控制模式。 1.通过对伺服电机的控制可以制造出机器人或者航天器的机械臂。 伺服电机受控制器控制,而控制器内部的编码是由工程师编写。 没有编码或者没有程序的控制器是不会控制伺服电机工作的。 2.航天器上面用的机械臂,就是位置控制模式,力矩控制模式和速度控制模式组合。 因为航天器机械臂工作的时候对精度要求特别高,所以必须用位置控制模式才可以。 其他两种模式只是辅助,让机械臂工作效率更高。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论