简介
伺服控制是自动化系统中一种常见的控制技术,用于精确地控制设备或系统的运动和位置。它广泛应用于机器人技术、制造业和医疗保健等领域。掌握伺服控制模式对于设计和实现有效的伺服控制系统至关重要。伺服控制模式
不同的伺服控制模式提供了不同级别的控制和性能。以下是一些最常见的伺服控制模式:位置控制
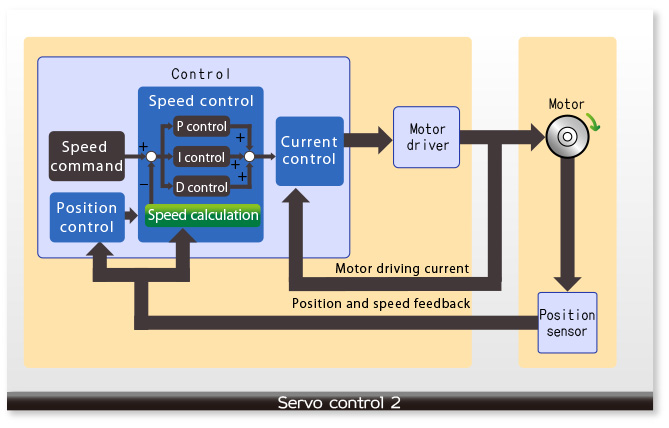
系统根据目标位置或轨迹控制设备的位置。控制器计算偏差(目标位置与实际位置之间的差异)并产生控制信号以消除偏差。优点:提供精确的位置控制,用于定位和跟踪应用。速度控制
系统根据目标速度控制设备的速度。控制器计算速度误差(目标速度与实际速度之间的差异)并产生控制信号以消除误差。优点:提供平滑和受控的速度控制,用于运动控制应用。力矩控制
系统根据目标力矩控制设备的力矩。控制器计算力矩误差(目标力矩与实际力矩之间的差异)并产生控制信号以消除误差。优点:提供对力矩的精确控制,用于机器人抓取和力敏感应用。
阻力控制
系统使设备以预定义的阻力(类似于摩擦)移动。控制器调节设备的力矩以匹配目标阻力。优点:提供阻力感觉,用于力反馈设备和触觉交互应用。选择伺服控制模式
选择合适的伺服控制模式取决于以下因素:控制目标:确定所需的性能,例如位置精度、速度范围或力矩控制。系统动态:考虑设备的惯性、摩擦和刚度等物理特性。传感器可用性:选择与所需控制模式兼容的传感器(例如位置传感器、速度传感器或力传感器)。成本和复杂性:不同的控制模式可能具有不同的成本和复杂性考虑因素。伺服控制系统设计
设计伺服控制系统时,考虑以下步骤:1. 定义控制目标:明确系统的性能要求和控制目标。2. 选择控制模式:根据控制目标和系统动态选择合适的伺服控制模式。3. 设计控制器:设计控制器以最小化误差、稳定系统并满足性能要求。4. 实施控制算法:使用微控制器、可编程逻辑控制器 (PLC) 或其他数字控制设备实施控制算法。5. 调优系统:通过调整控制器参数优化系统性能,例如增益和积分时间。结论
掌握伺服控制模式对于设计和实现有效的伺服控制系统至关重要。理解不同控制模式的特性和优缺点使工程师能够根据特定应用的要求选择合适的控制策略。通过遵循经过验证的设计步骤,可以实现精确、平稳和鲁棒的伺服控制系统。伺服电机驱动方式:速度模式,力矩模式,位置模式。 最常见的伺服电机控制模式是速度模式和力矩模式。 速度模式通过改变电机的电流或者电压来改变电机转动的速度,达到想要的效果。 力矩模式最常见的就是线切割,设定程序后设备保持一定的力矩进行切割。 伺服电机分交流驱动和直流驱动。 交流驱动的电压一般是220V或者380V。 直流驱动电压一般都小于48伏。 比如车上用的私服电机是12伏驱动,货车上面用的24伏直流驱动。 伺服电机驱动的过程中是闭环控制,控制器根据传感器的信号反馈自动调整电机。
本文原创来源:电气TV网,欢迎收藏本网址,收藏不迷路哦!








添加新评论